Guia rápido MS300 para utilizar o CLP interno
O objetivo deste documento é efetuar a configuração do inversor de frequência utilizar o CLP interno, utilizando a linha MS300.
Introdução
As linhas de inversores MS300, MH300, C2000, C2000 Plus, entre outros modelos Delta, possuem o CLP interno incorporado ao inversor, muito utilizado em aplicação de pequeno porte que precisão de uma logica de controle para funcionamento, nesta solução não há a necessidade de utilizar um CLP externo, diminuindo o custo do projeto.
Configuração
Segue passos abaixo:
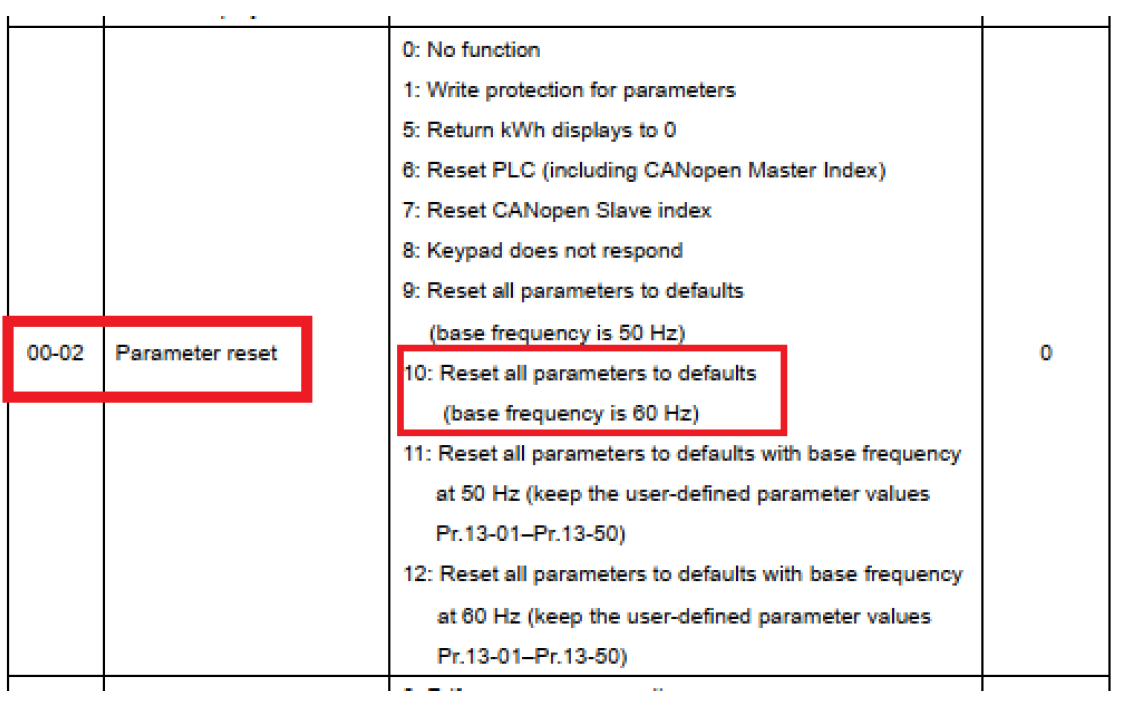
Efetue o “Reset” de fábrica no inversor, caso o CLP interno esteja na opção 1 ou 2 altere para 0:
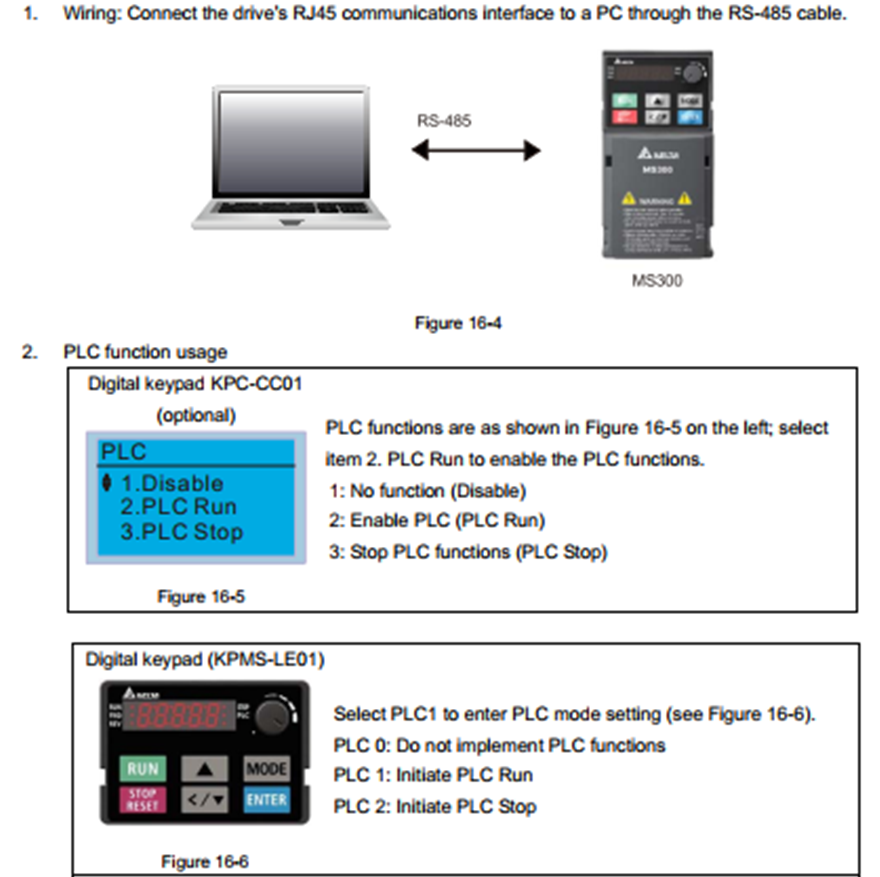
1. Conecte o cabo do computador para o USB do inversor, e selecione o CLP no display do inversor para modo 2:
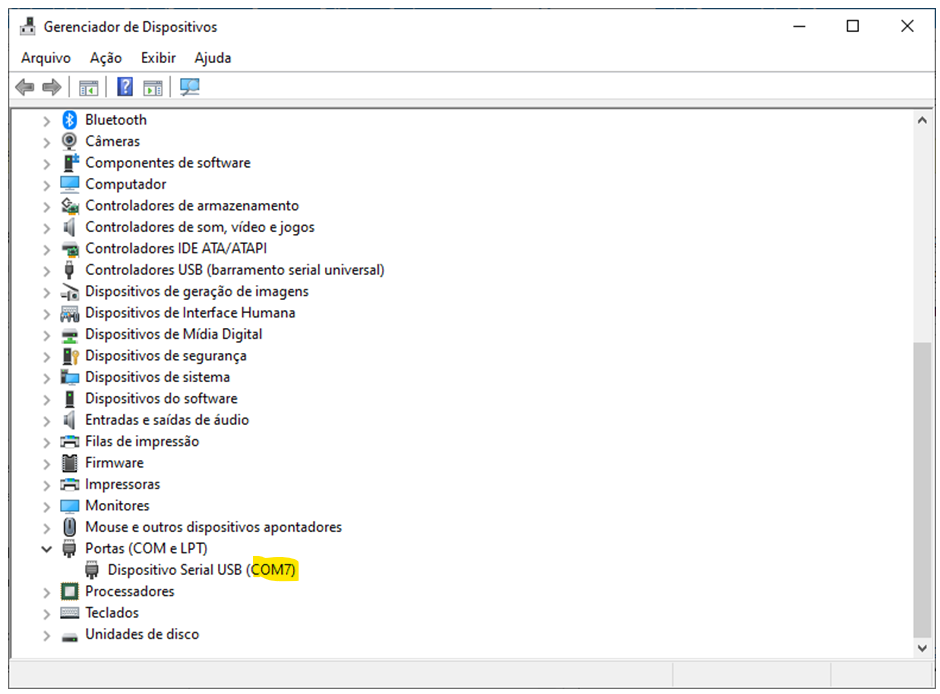
2. Verificar se o computador criou uma porta serial:
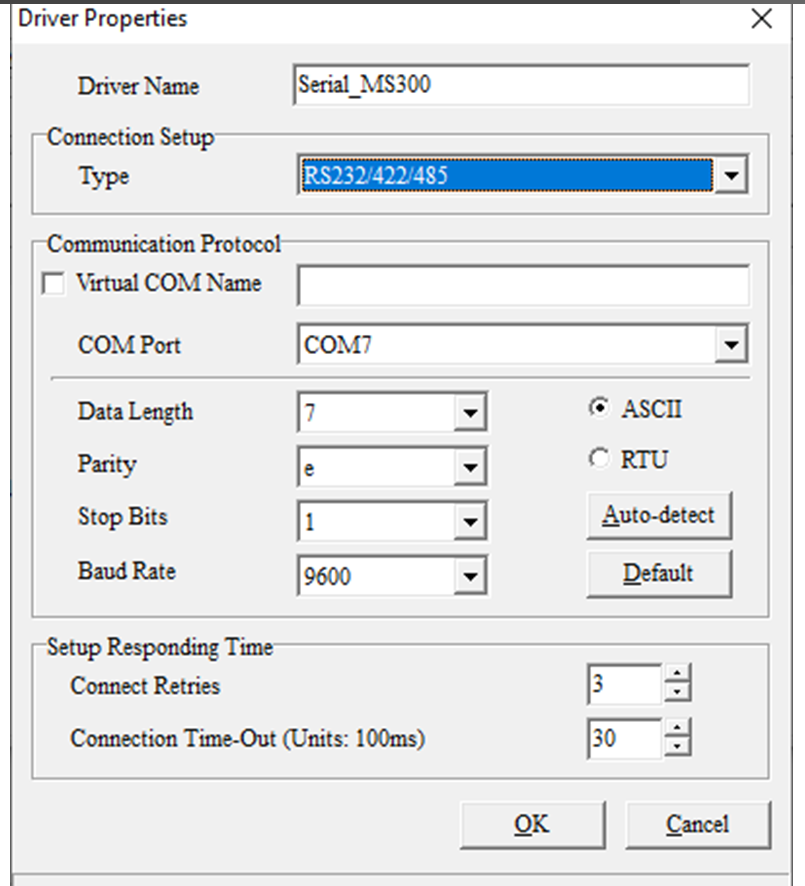
3. Adicionar uma configuração serial ao COMMGR:
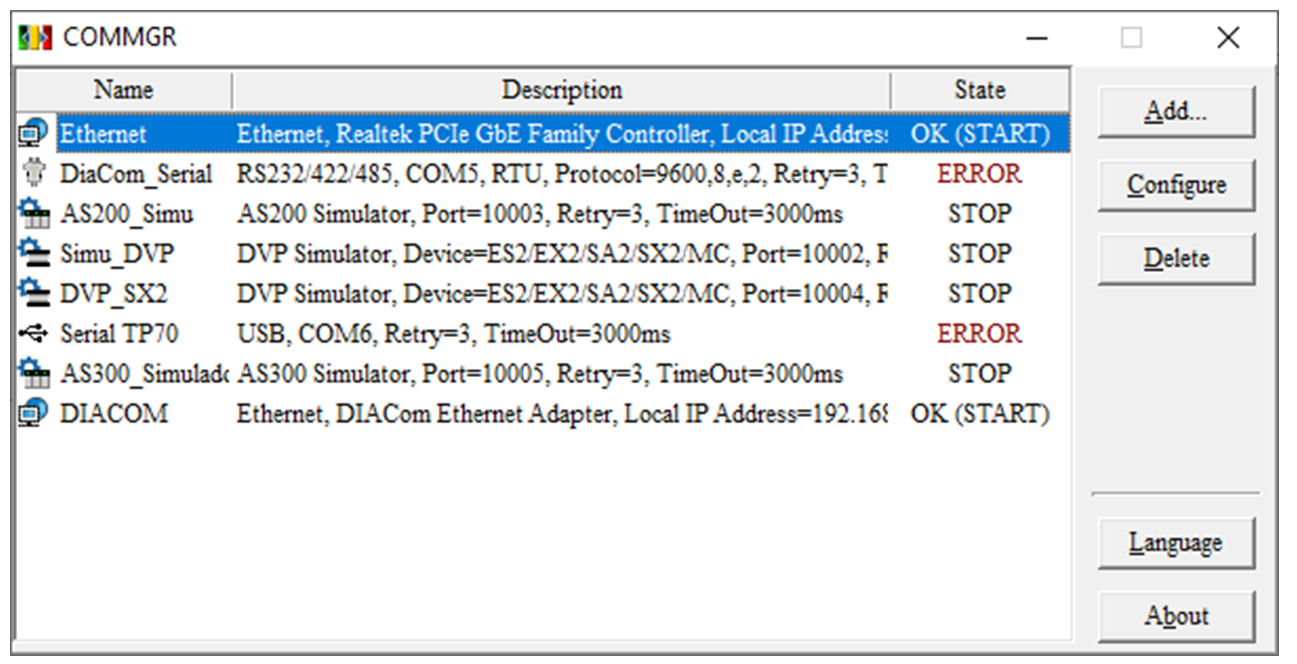
4. Selecionar a porta “COM Port” de acordo com o passo 1:
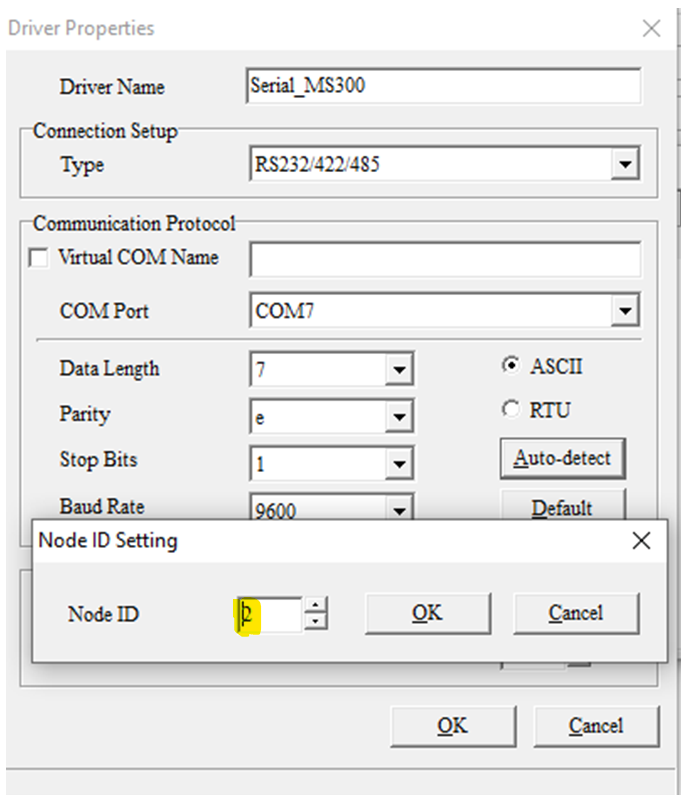
5. Efetuar o Auto Configura no botão “Auto-detect”, altere o ID para 2:
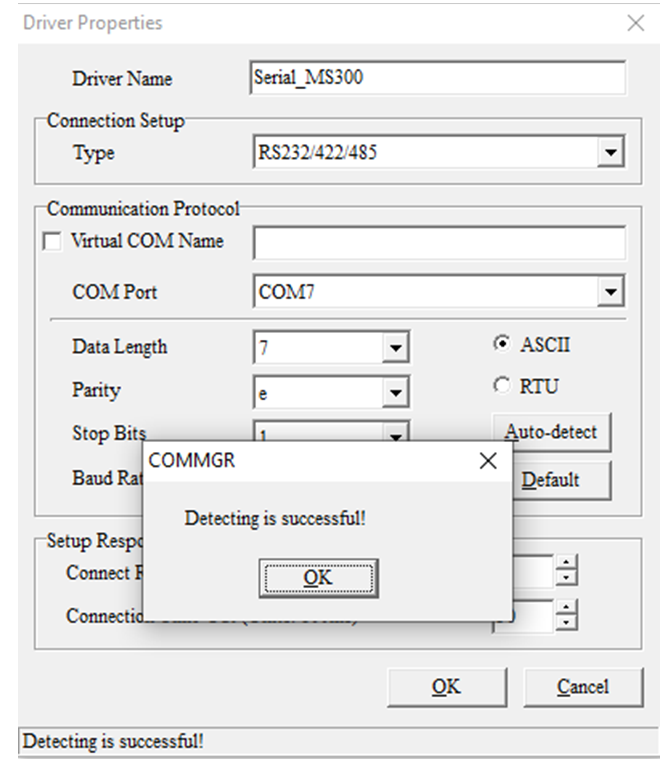
6. Após deve aparecer a mensagem de sucesso:
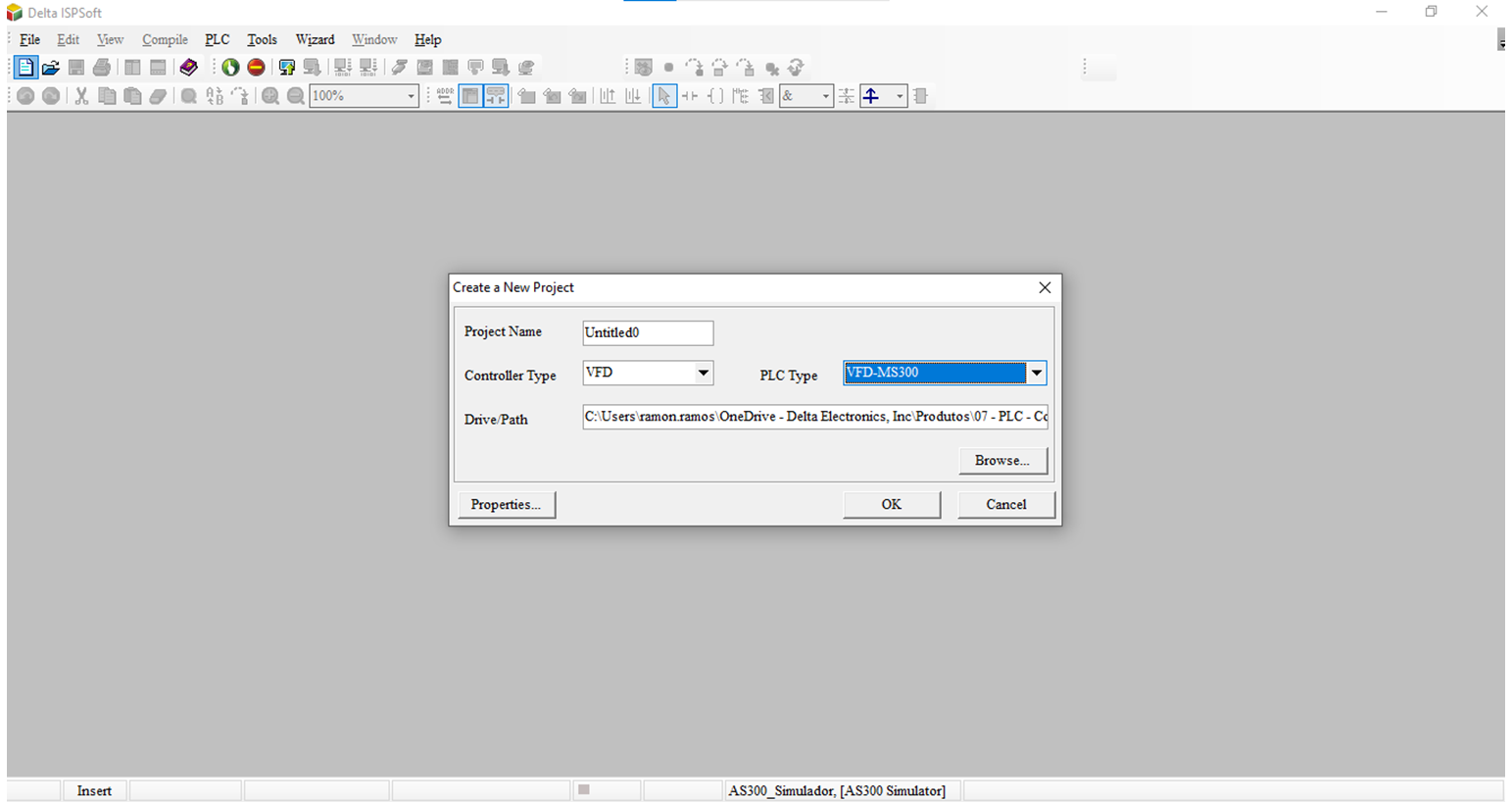
7. Abra o ISPSoft e crie um novo programa selecionando o modelo do CLP como VFD-MS300:
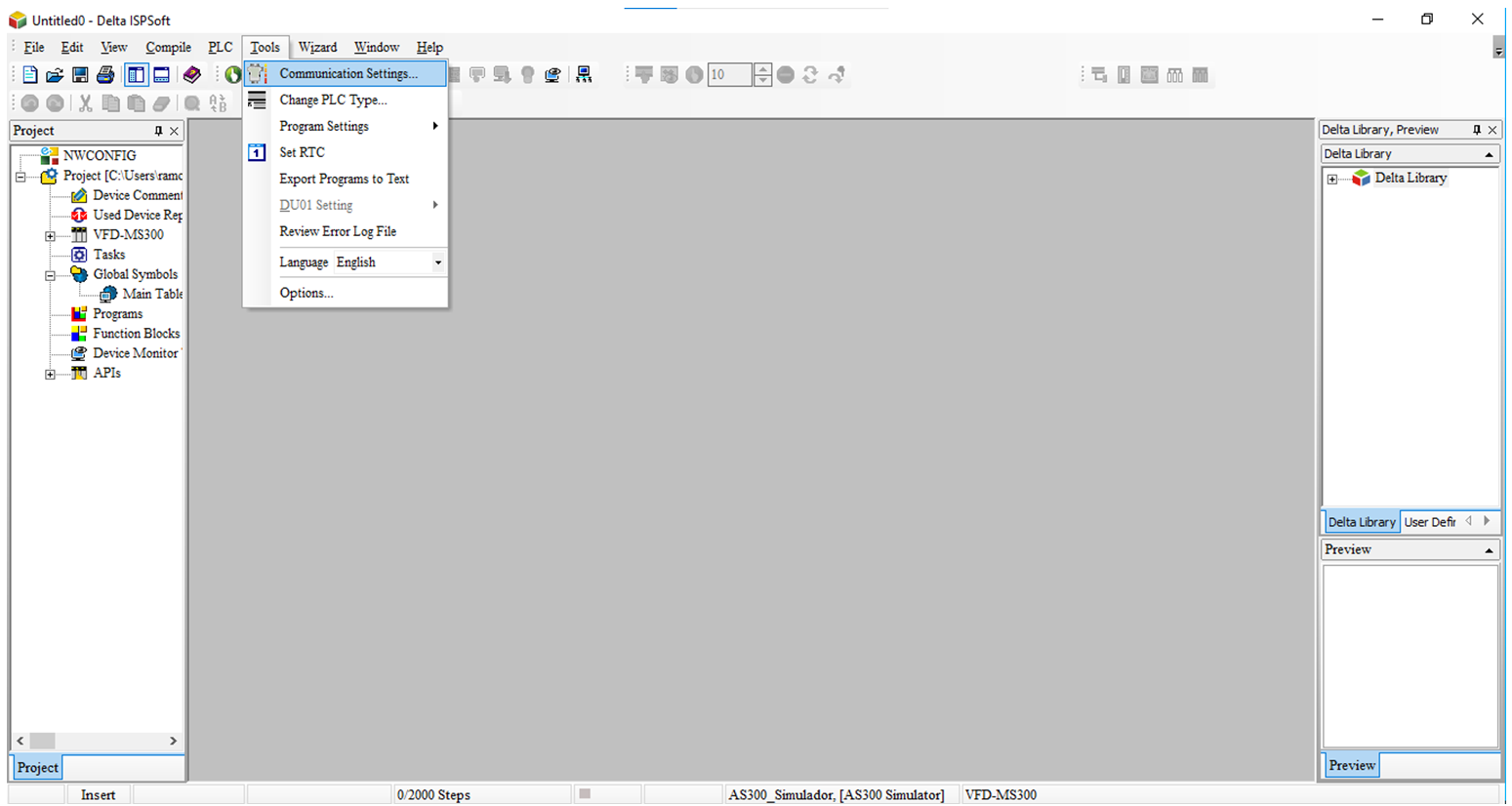
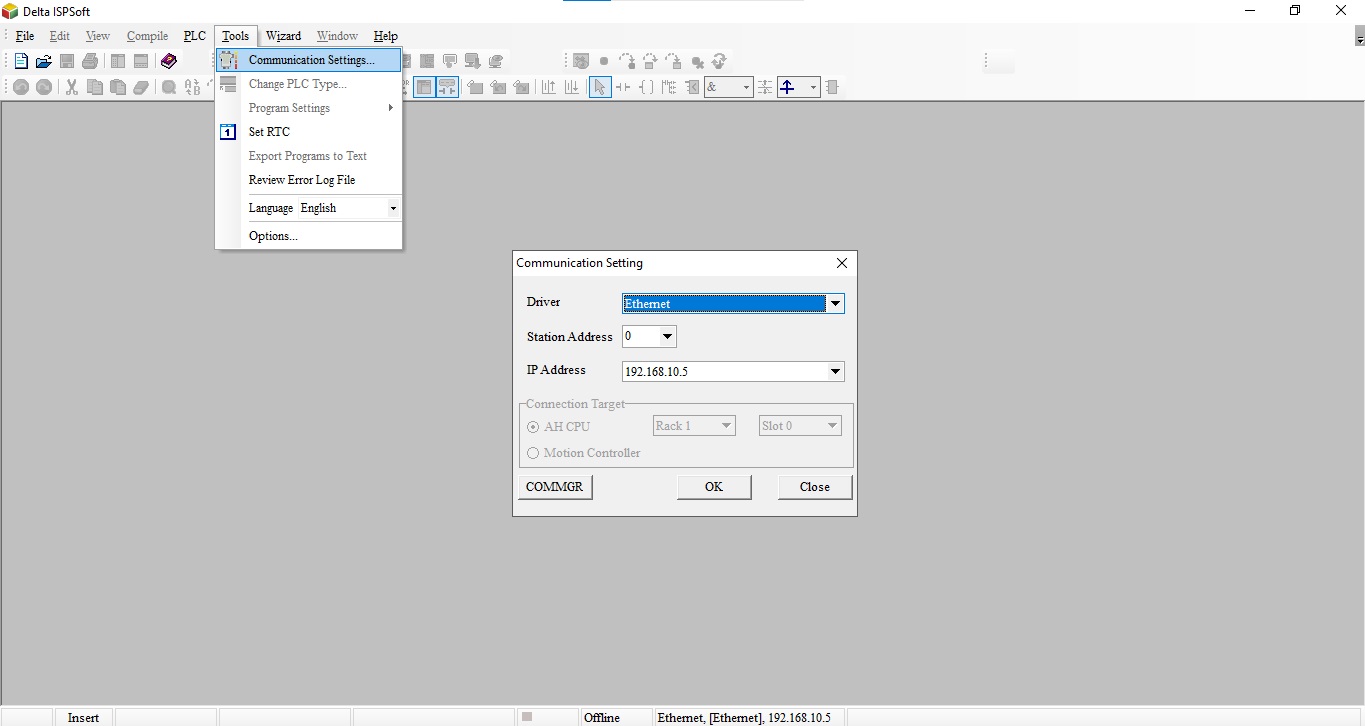
8. Na seleção de “Tools” e “Communication Settings…” selecionar a comunicação que criou no COMMGR:
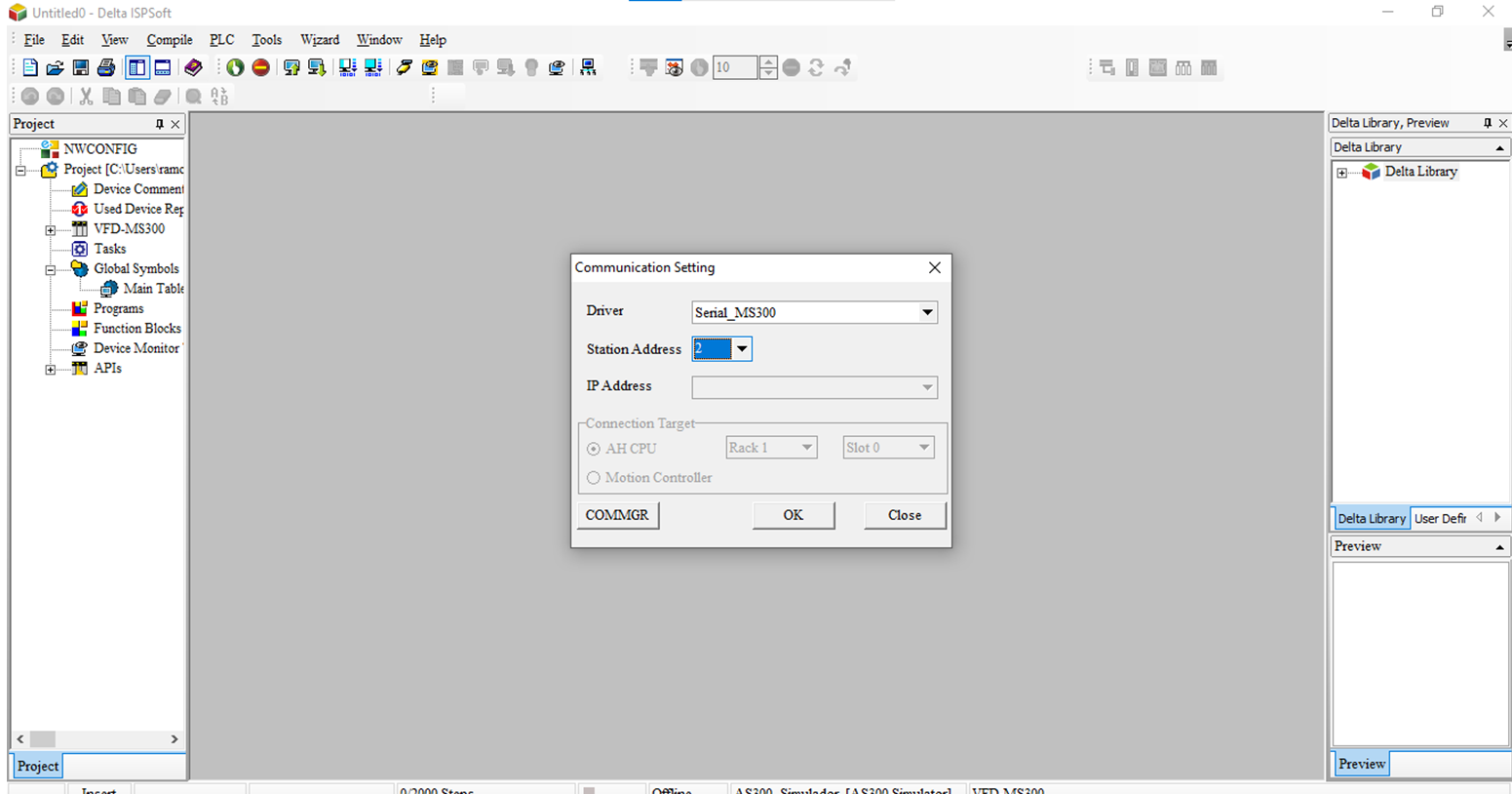
9. Selecione a comunicação e altere o ID para 2:
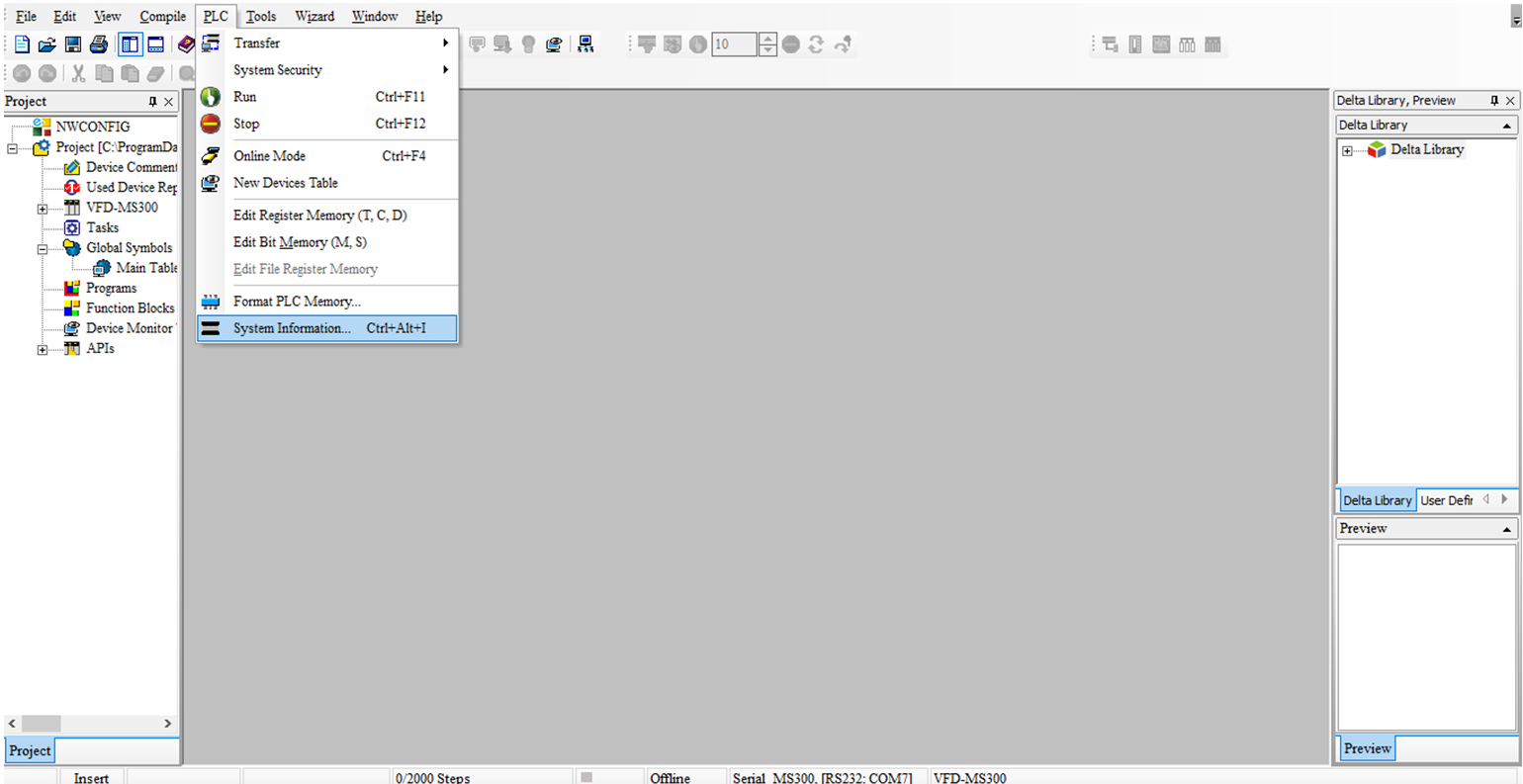
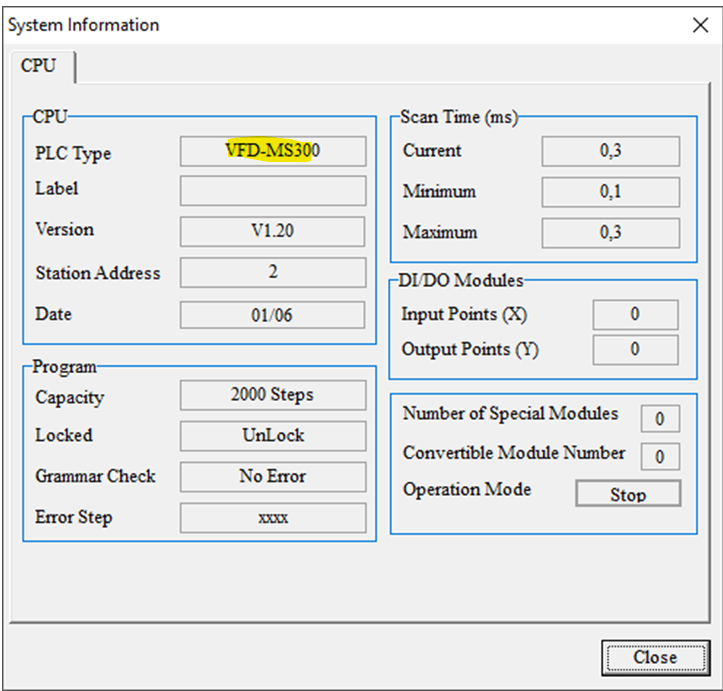
10. Na aba “CLP” na opção “System Information” ao clicar será exibida uma pop-up com informações do CLP do inversor MS300:
11. Comunicação com CLP interno MS300:
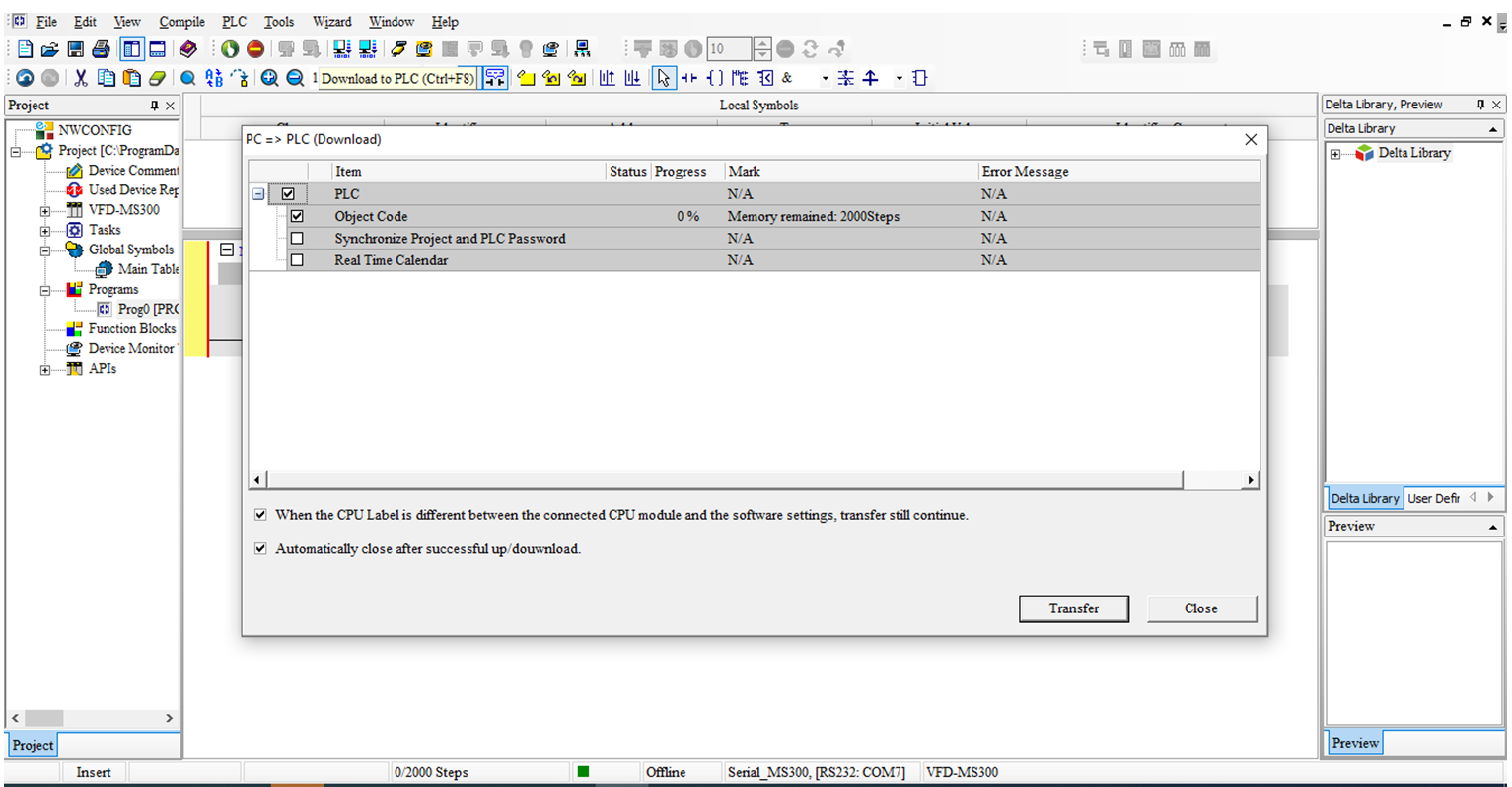
12. Crie sua lógica e descarregue no CLP interno do MS300:
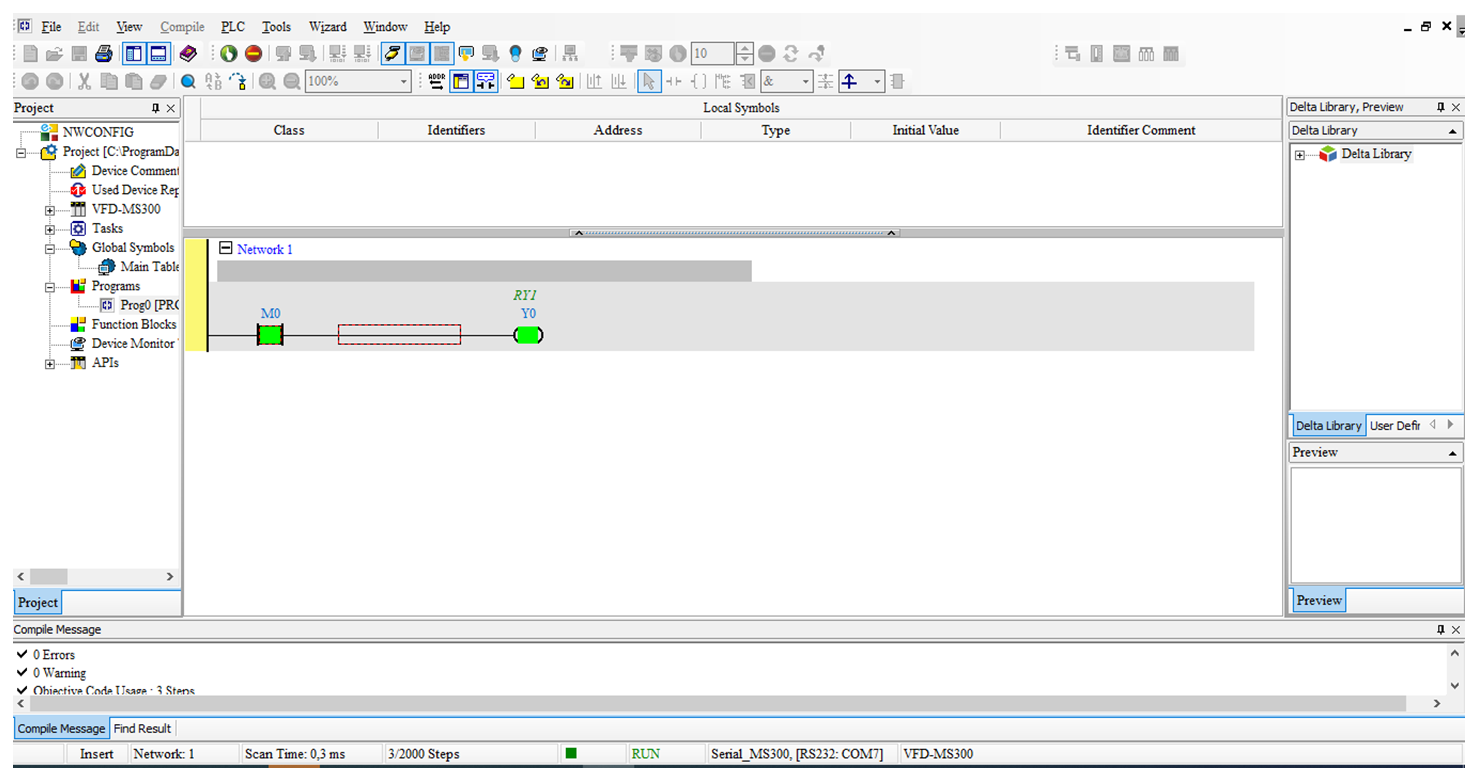
13. Opção do modo online para visualizar a lógica desenvolvida:
Criando Pulso em um “Functuion Block”
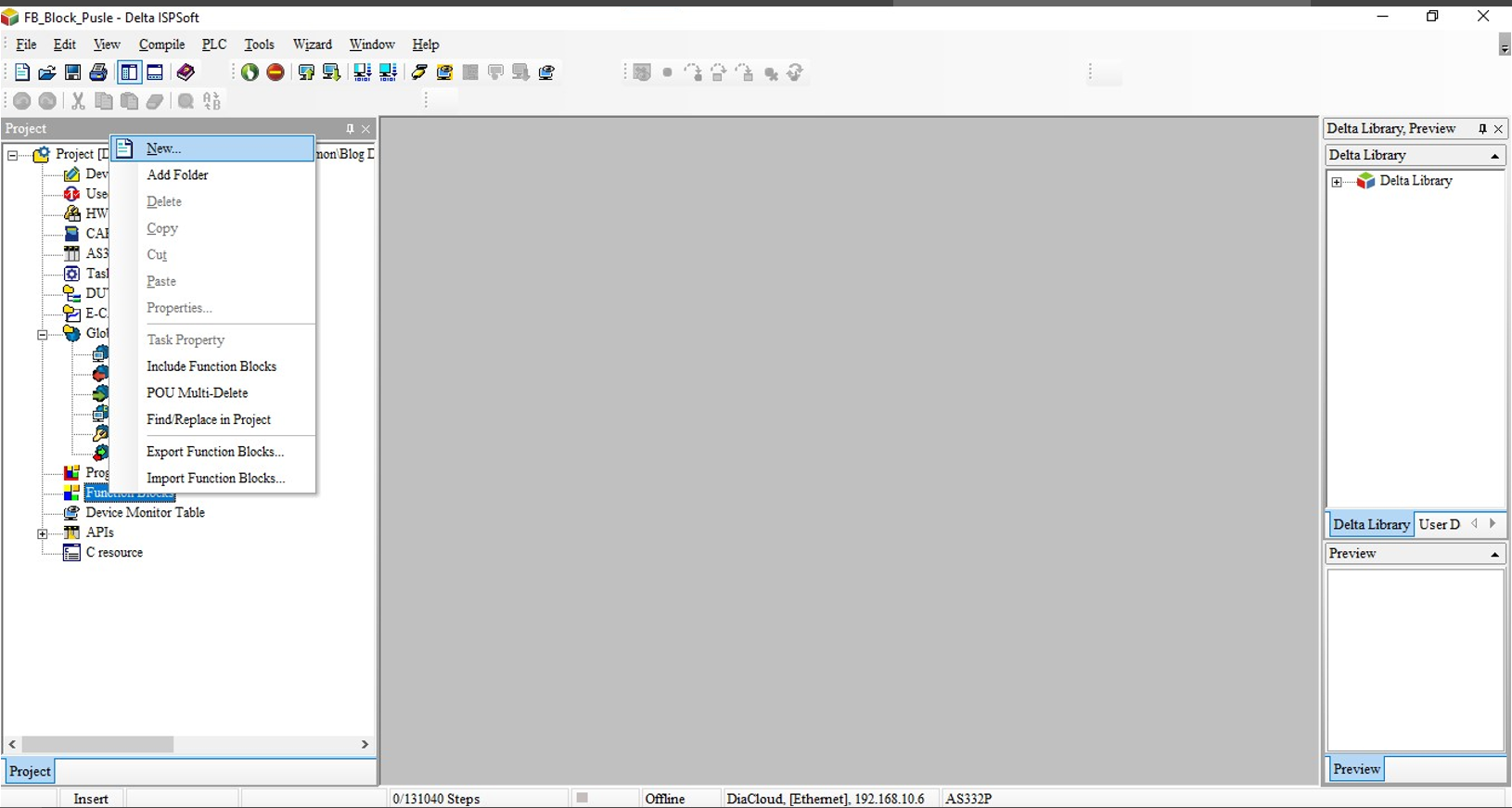
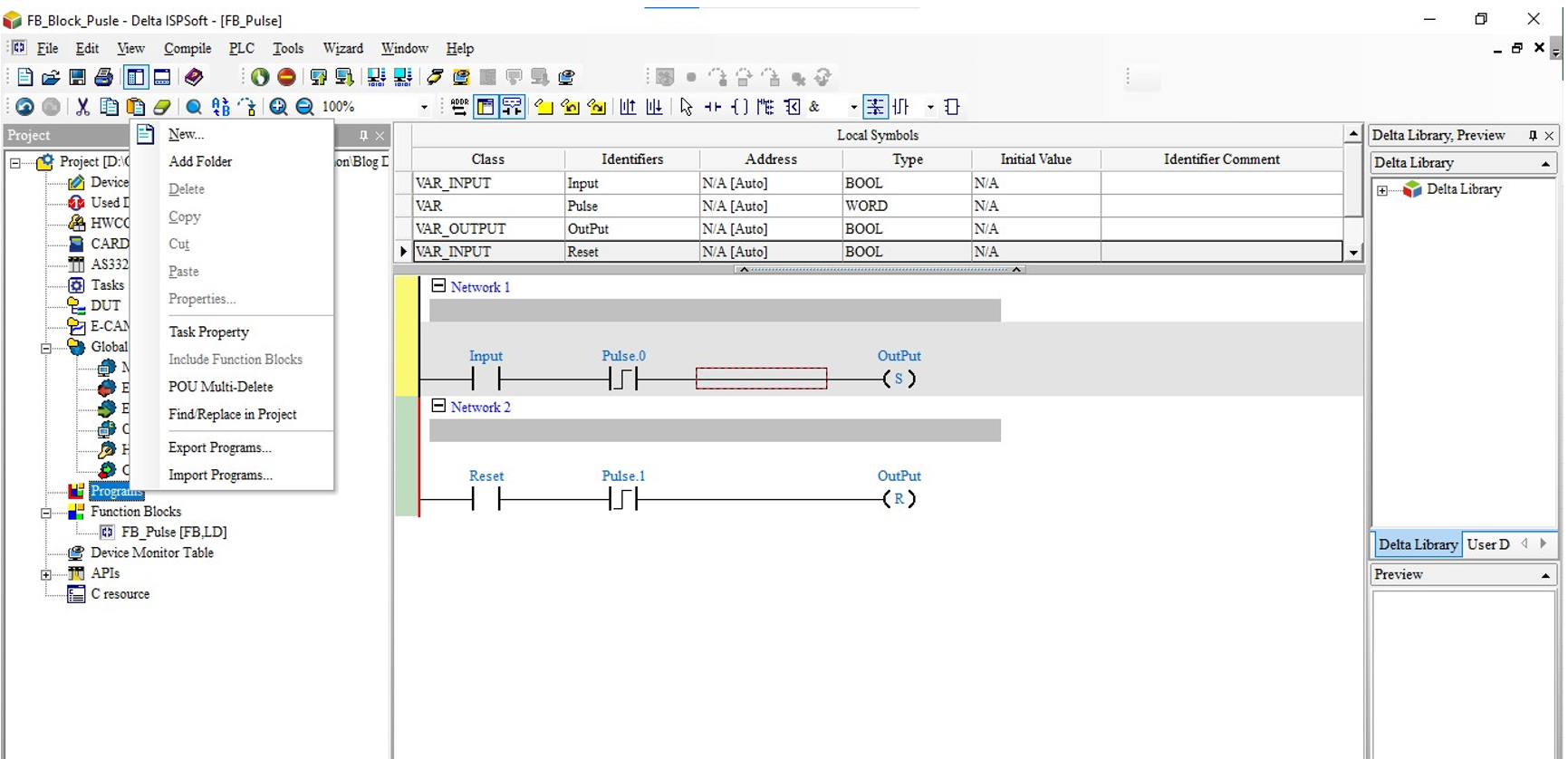
- Abra o ISPSof e selecione a opção para criar um FB (function block):
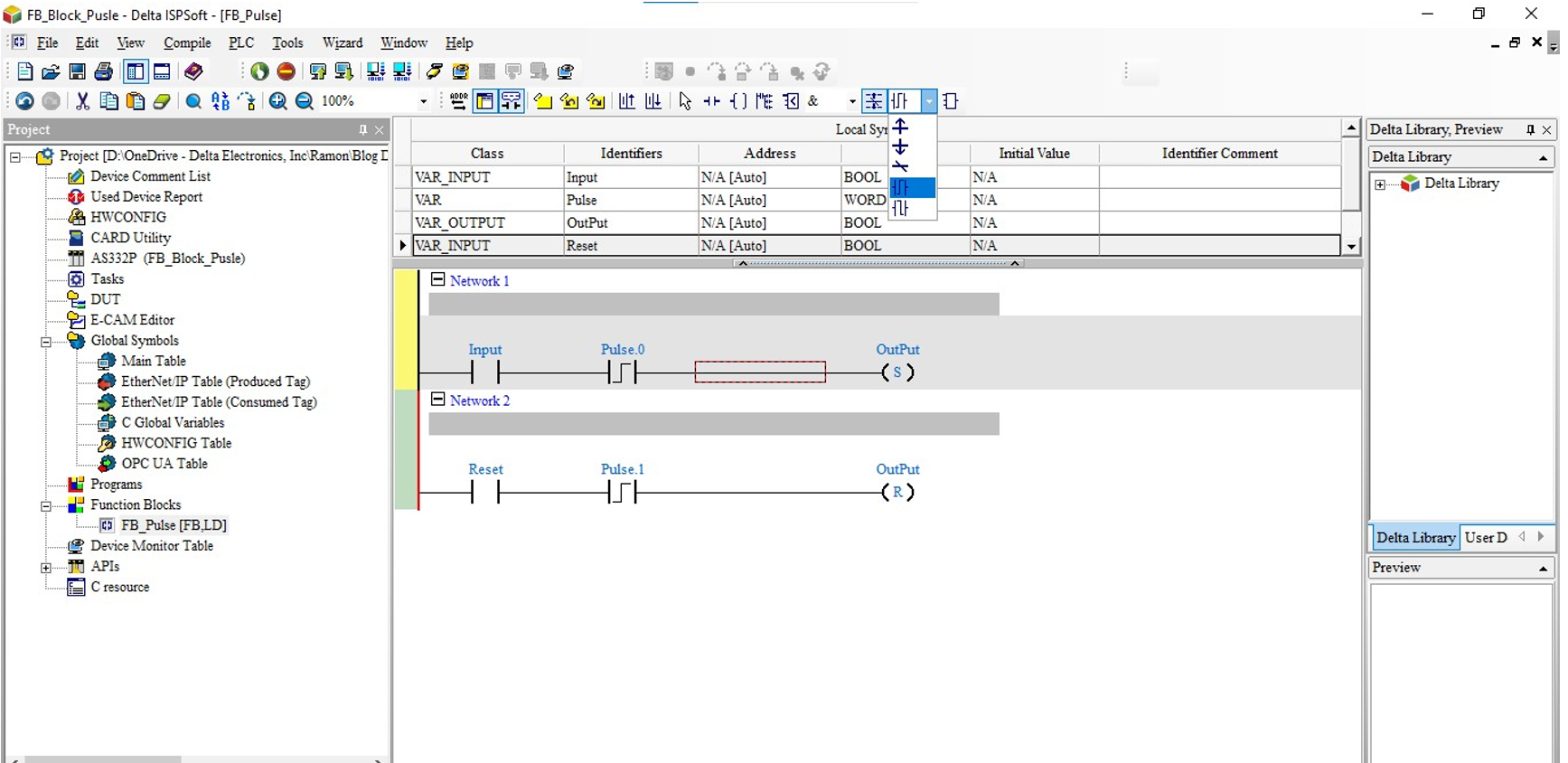
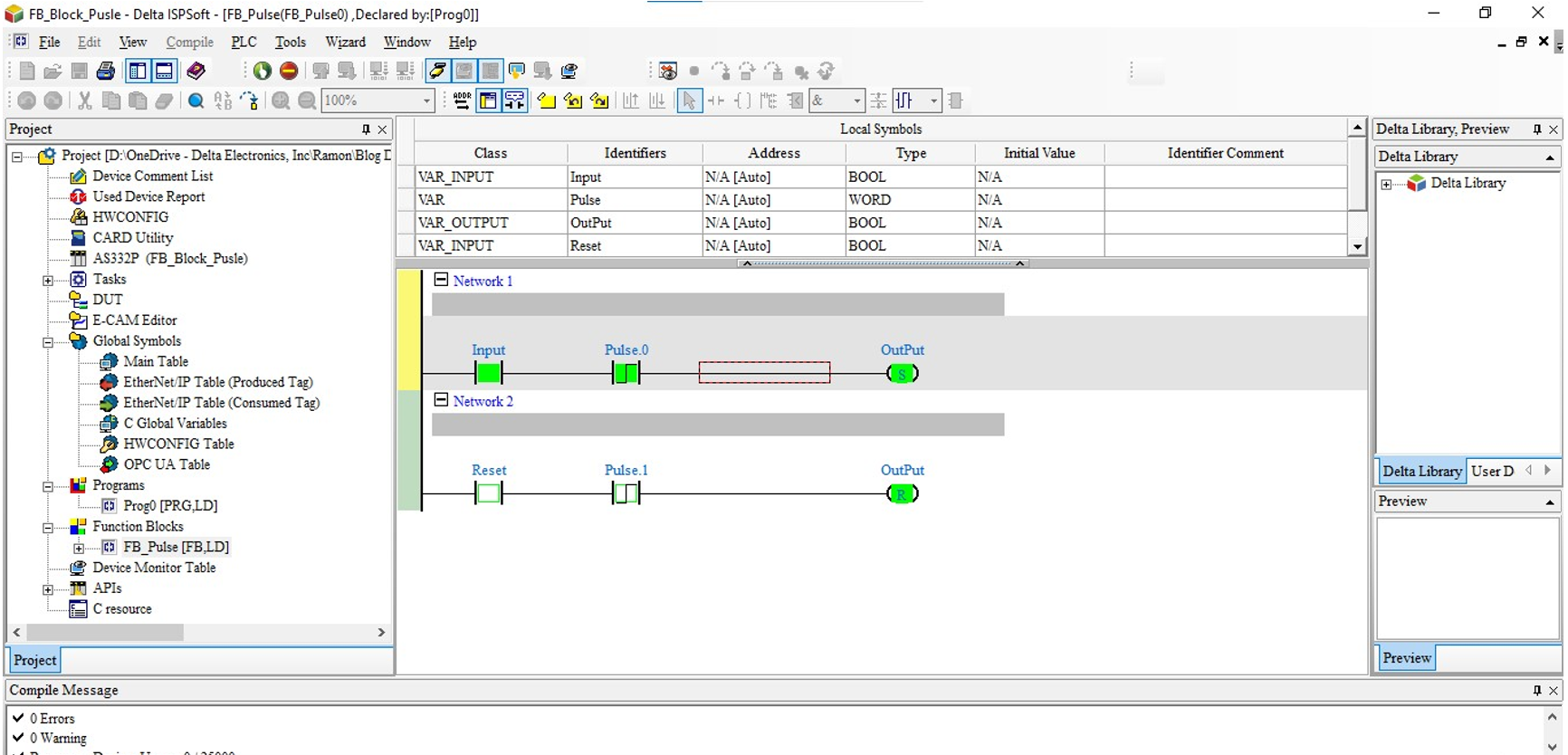
- Dentro da FB, pode criar uma lógica utilizando a função de pulso conforme demostra a imagem abaixo:
- Após criar o bloco FB, para utilizar na logica precisa criar um novo programa conforme demostra a imagem abaixo:
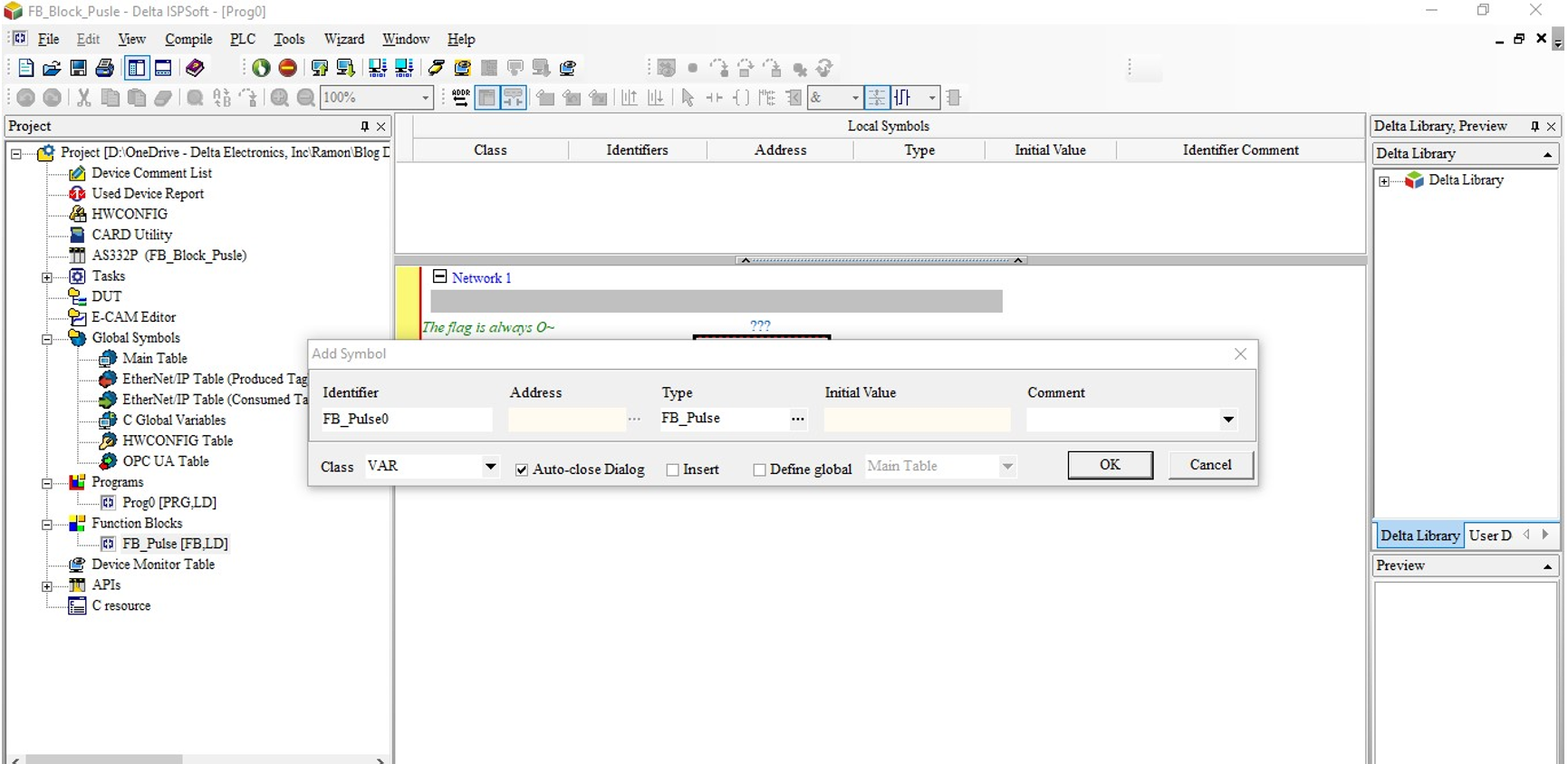
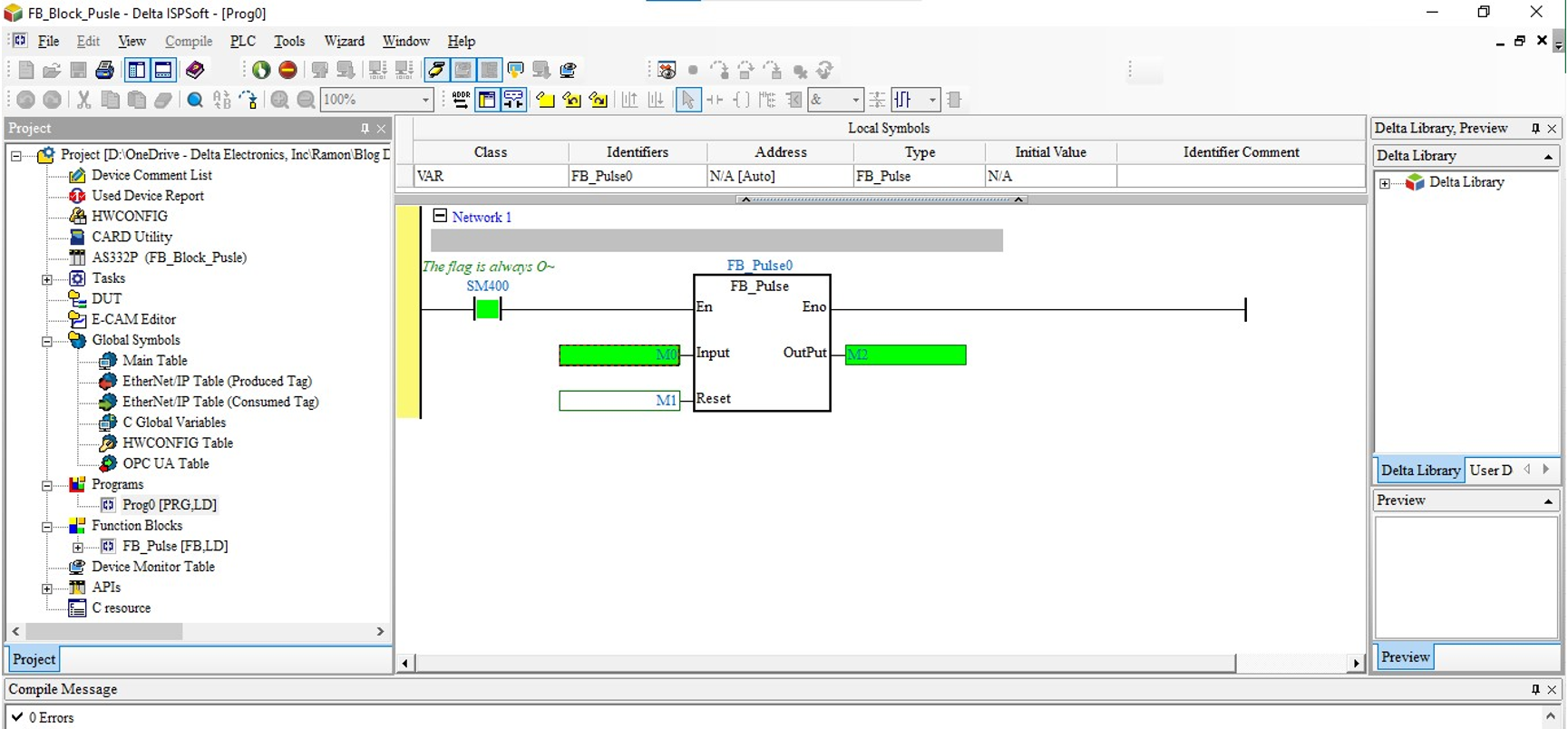
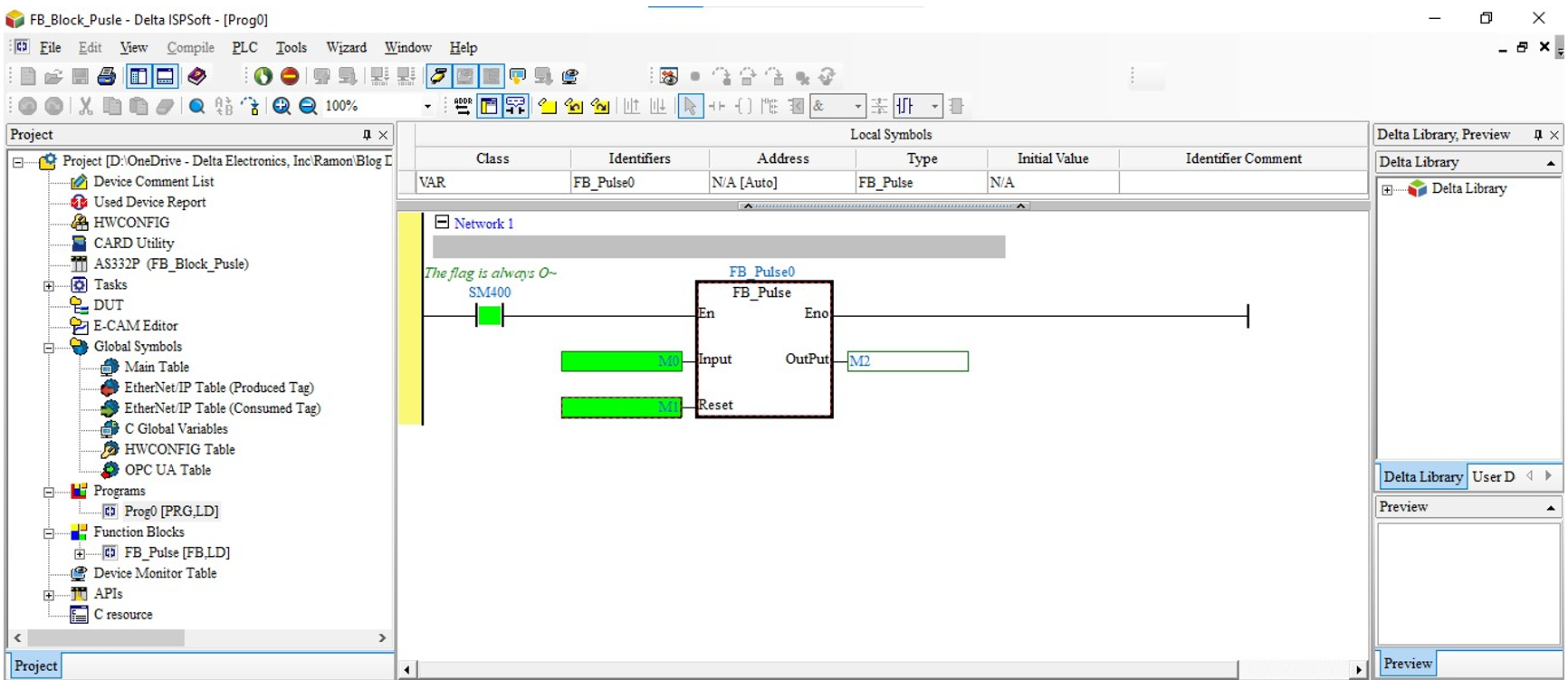
- Arreste o bloco FB para o ladder e coloque um nome:
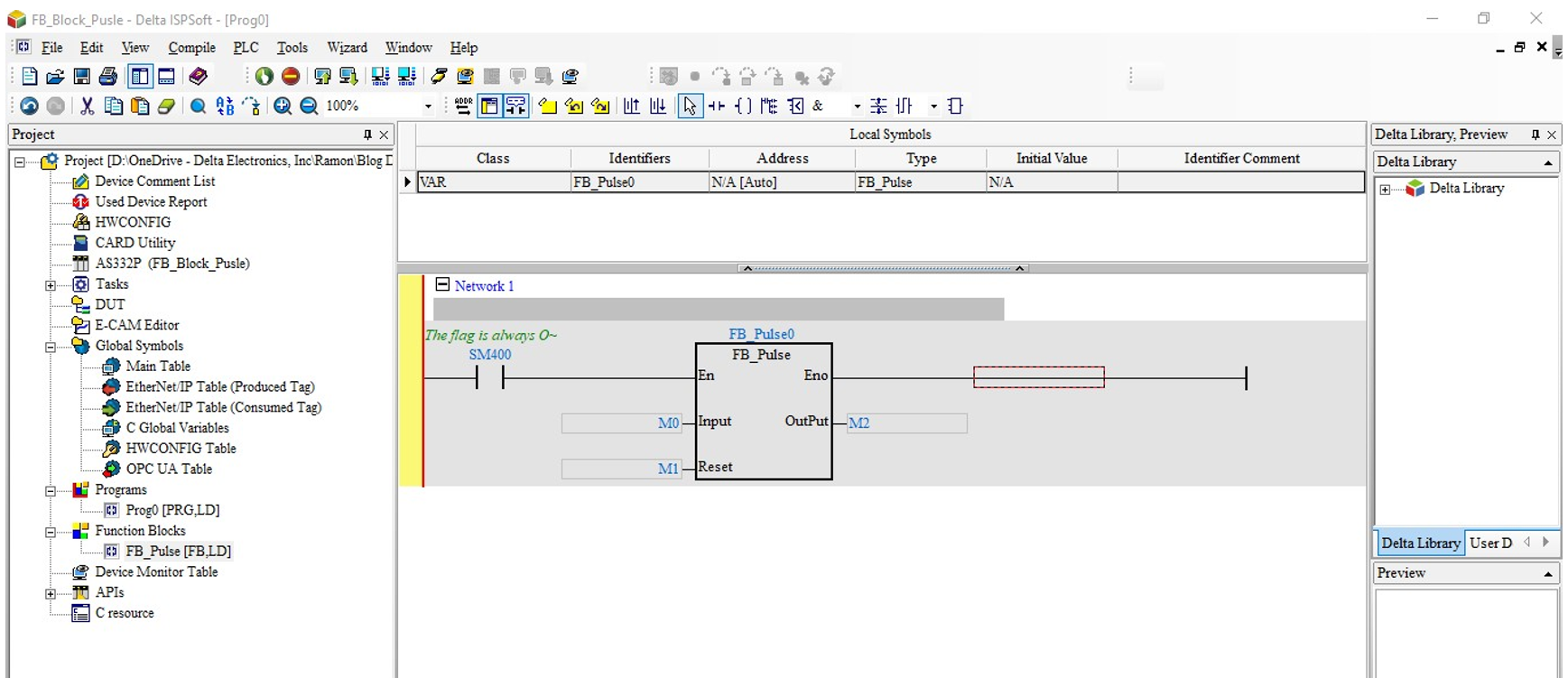
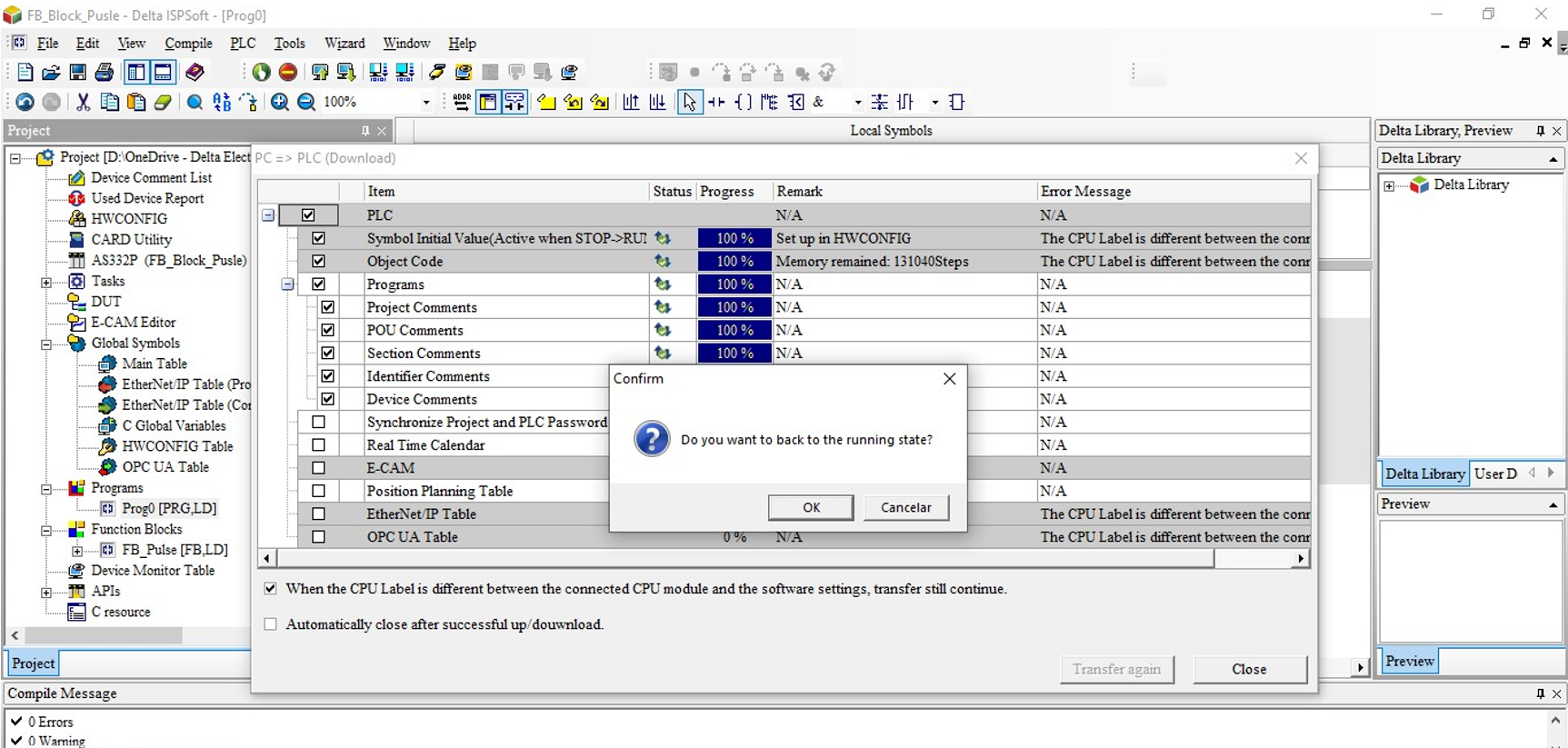
- Compile o projeto e efetue o download do programa:
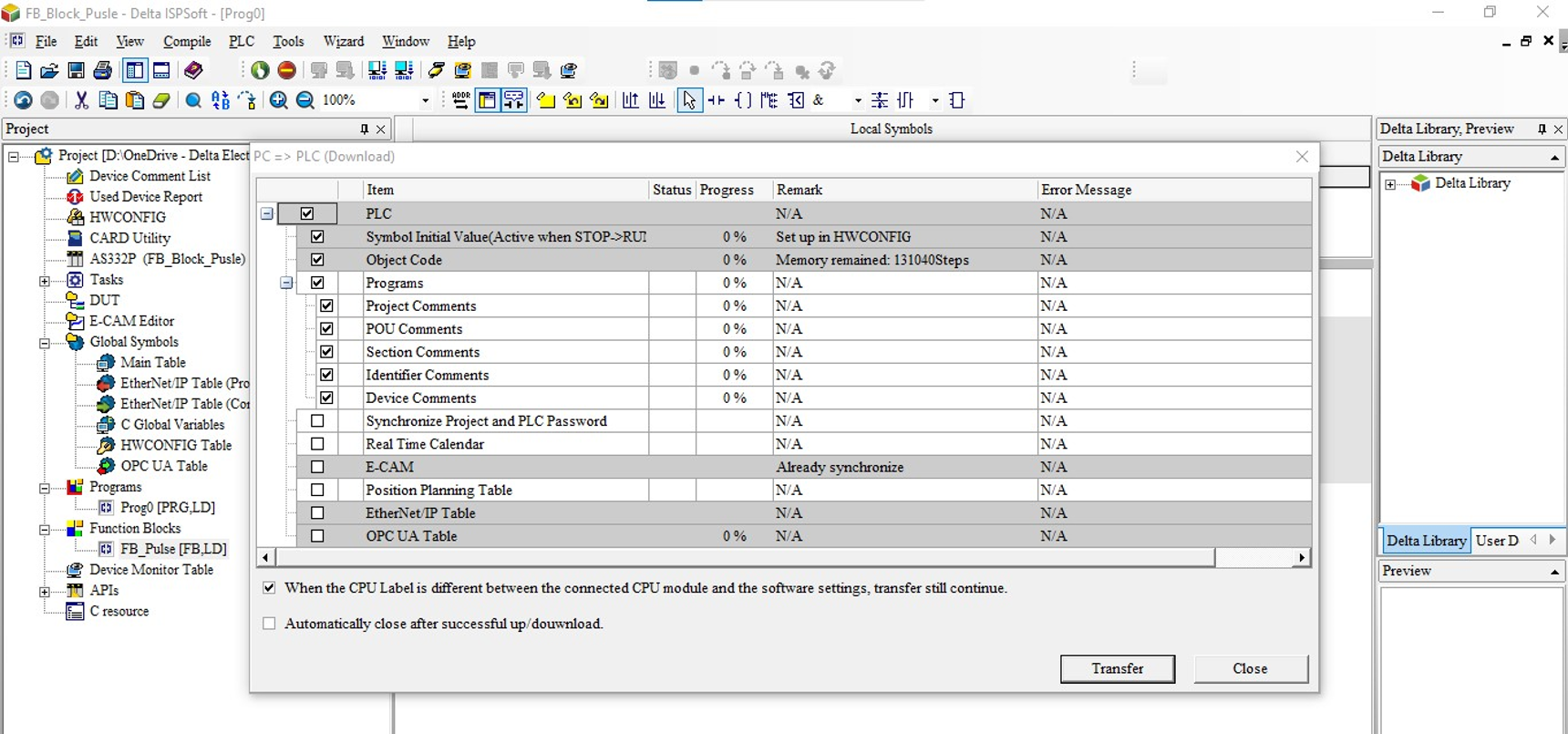
- Com o download concluído ao ficar online, pode conferir o funcionamento do bloco:
Para comunicar qualquer dispositivo modbus serial (RS485) com o CLP da TP70P, é necessário configurar a comunicação na mesma faixa e utilizar de blocos para escrita e leitura, pode utilizar dois modos para efetuar a configuração da porta serial de comunicação.
Assista o vídeo passo a passo:
Abaixo um passo a passo:
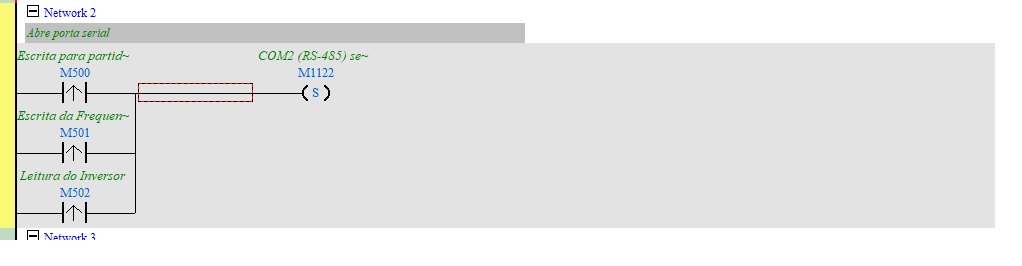
- Movendo valores para memorias especificas de configuração da porta serial, como exemplo COM2 em rede modbus 485, com os parâmetros baud rate (9600), data bits (7), paridade (even), stop bit (1), ASCII e ID do CLP como 1.
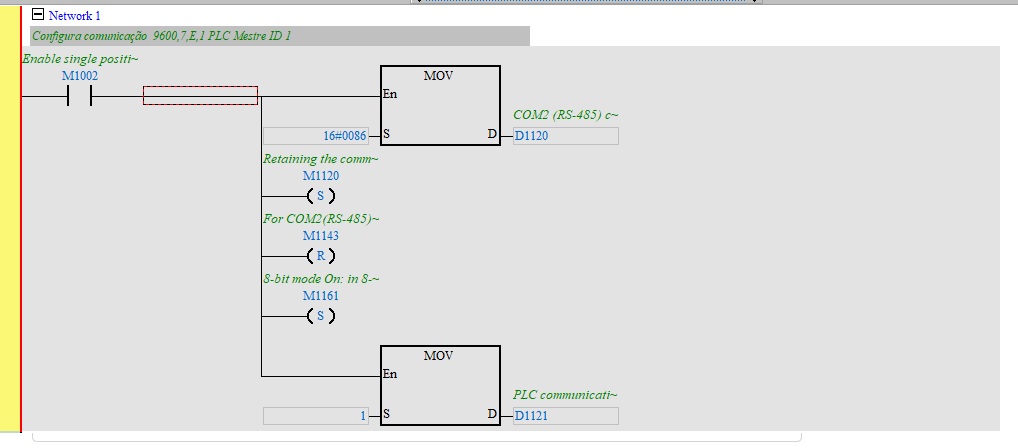
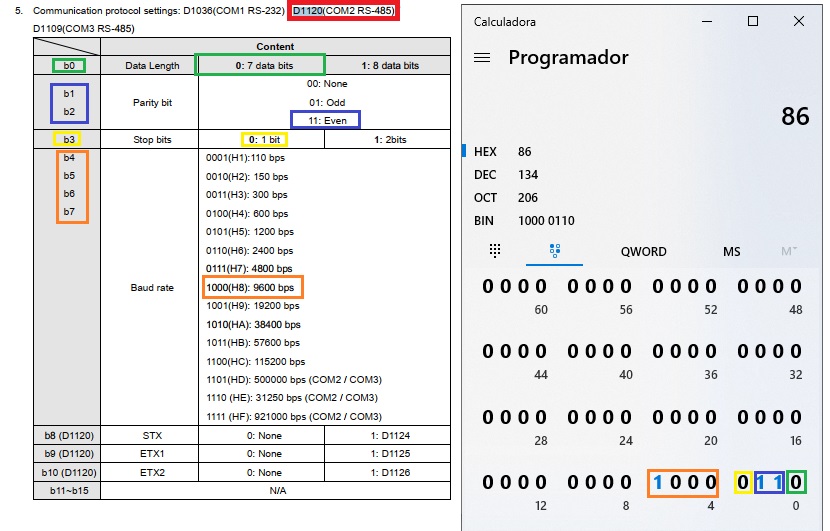
O valor do MOV na primeira linha de 16#0086 para a word D1120, está utilizando a sequência de bits demostrada na imagem abaixo, para configurar a porta COM2 em modbus RS485 como: 7, E, 1, 9600:
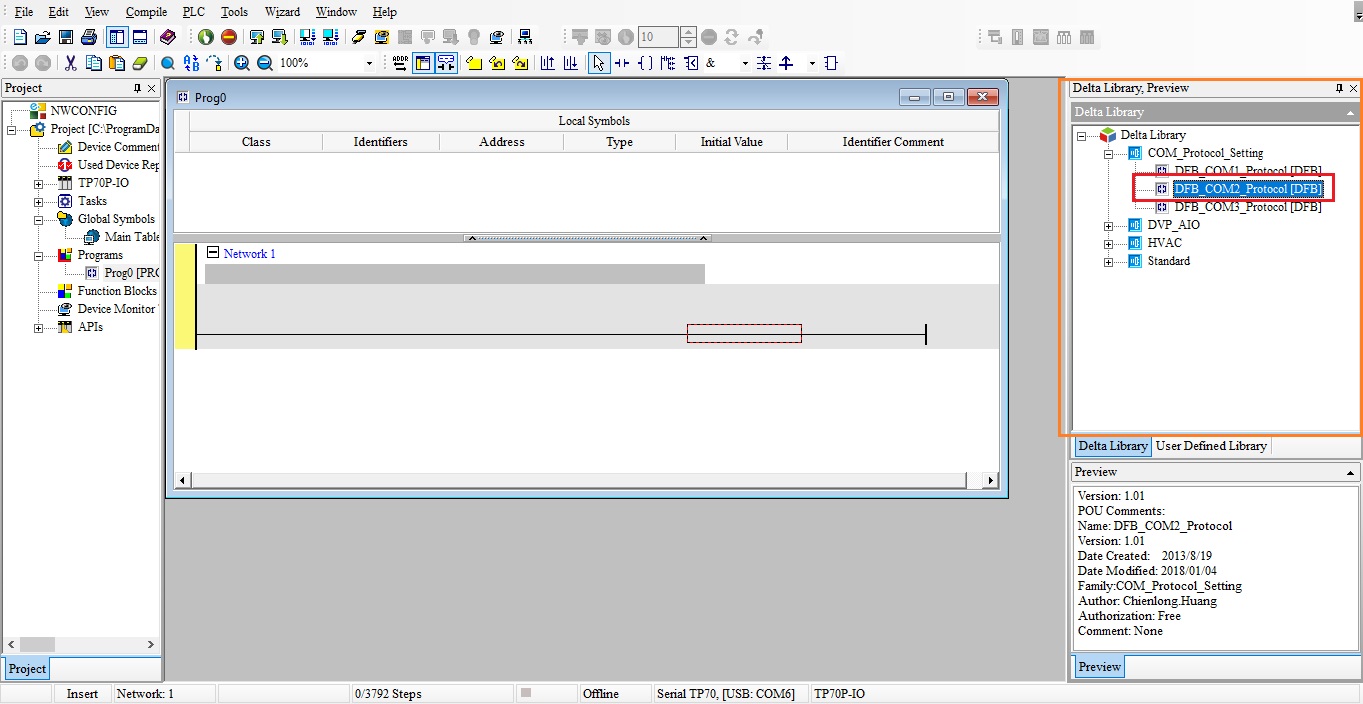
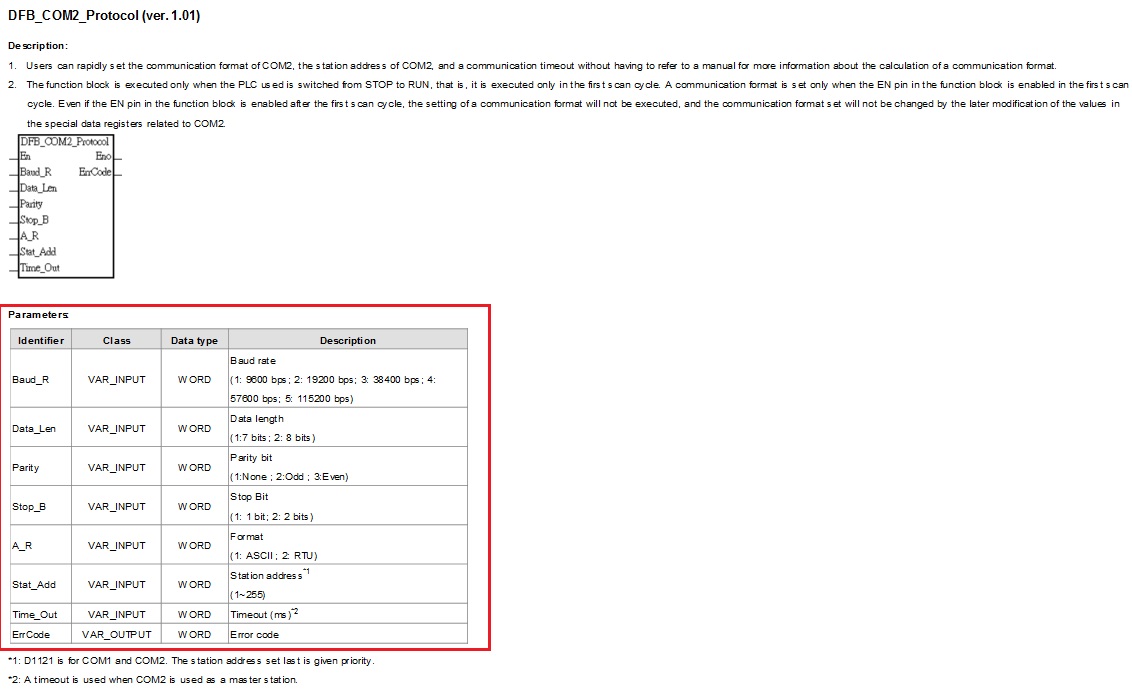
- Pode utilizar o bloco para definir a configuração da porta serial:
Selecionar a porta na biblioteca conforme demostra a imagem abaixo:
Arrastar para linha e configurar o bloco de acordo com a configuração da rede modbus, 9600/7/E/1 ASCII ID1:
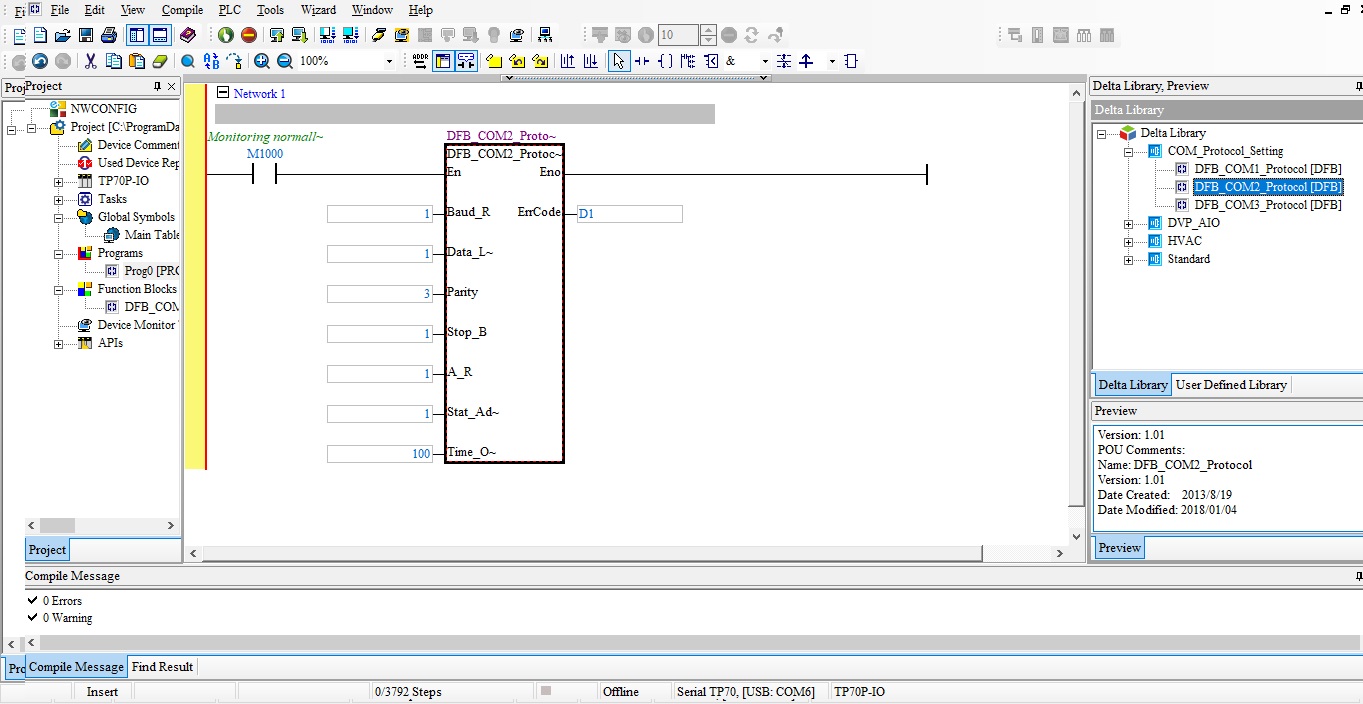
No help do bloco pode conferir os parâmetros de configuração:
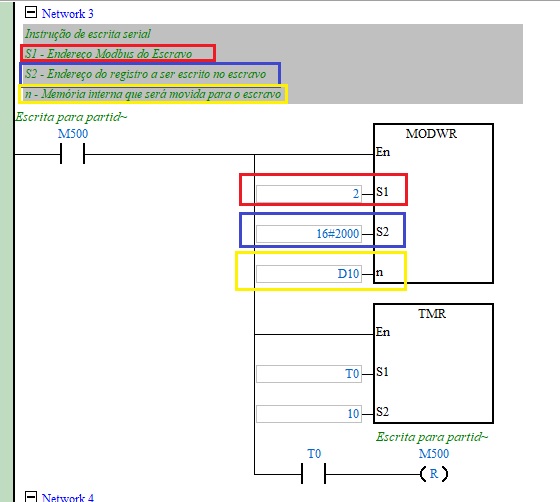
Após configurado o protocolo deve utilizar bloco de escrita (MODWR) e bloco de leitura (MODRD) para enviar e ler dados na rede modbus, no entanto cada bloco deve ser acionado de maneira individual:
Exemplo utilizando bloco de escrita (MODWR) para enviar comando na word (2000h) do inversor MS300 de partida/parada/sentido de giro:
O bloco utilizado para leitura na rede modbus neste exemplo foi MODRD, conforme demostra o exemplo abaixo de leitura do inversor MS300 com a leitura na word (2100h):
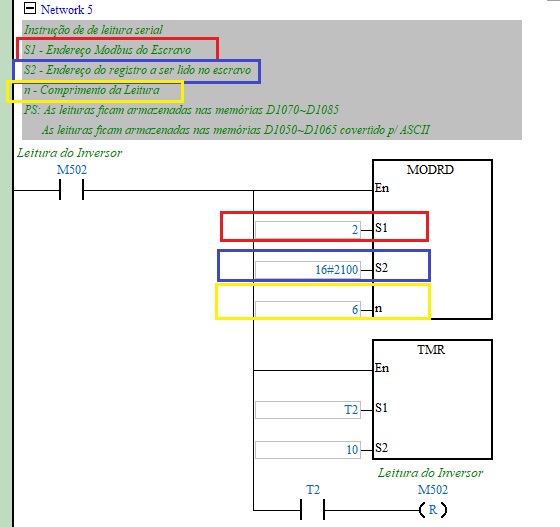
Ao efetuar a leitura utilizando o bloco MODRD os valores são armazenados nas word (D1050~D1055 ou D1070~D1085):
Após efetuar a leitura ou escrita é necessário acionar a memória M1122 para disparo da porta serial:
Para auxilio segue o link para baixar o exemplo do FAQ.
Clique aqui para baixar o exemplo -> Programa CLP MODRDeMODWR_TP70
Nesse FAQ mostraremos como a IHM altera a hora do sistema do CLP (RTC – Real Time Clock)
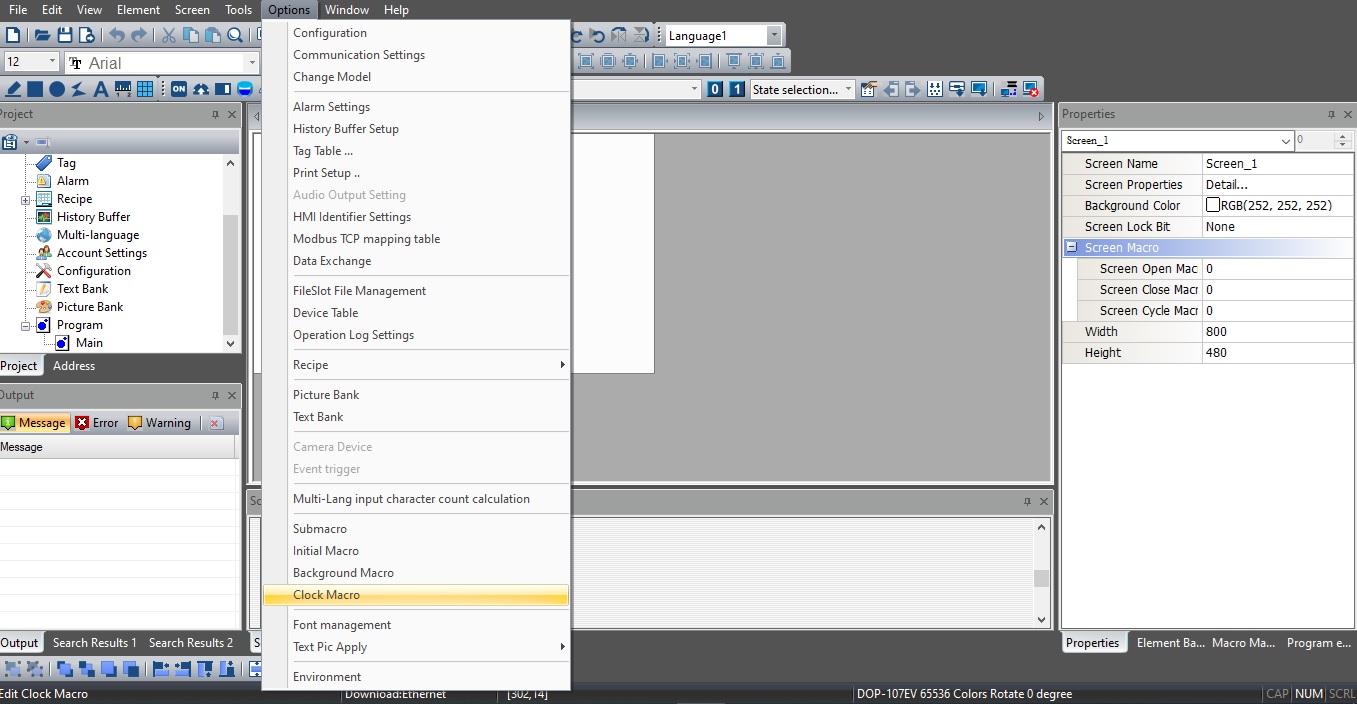
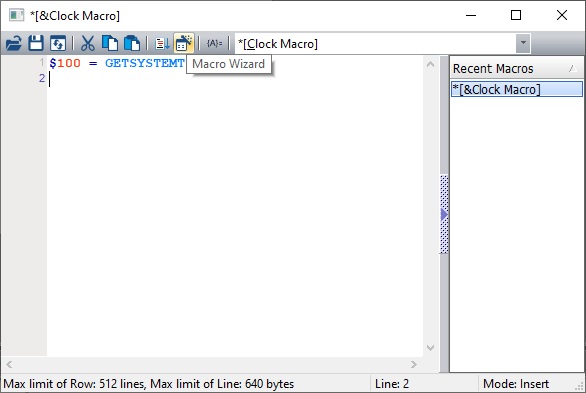
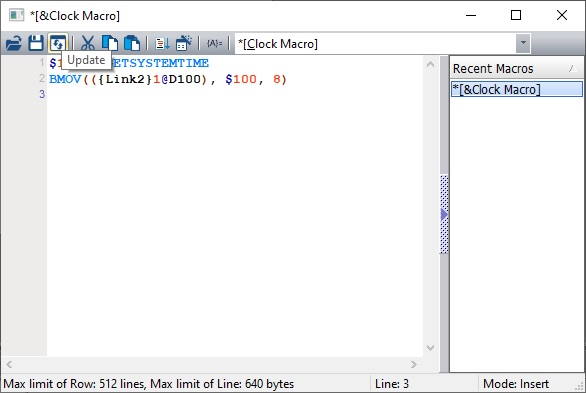
- Abrir uma Clock Macro:
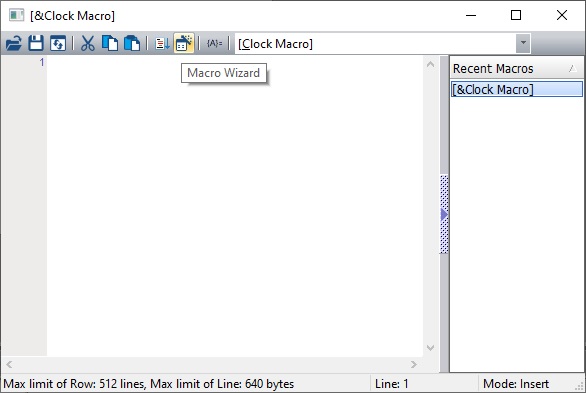
- Utilizar o Wizard:
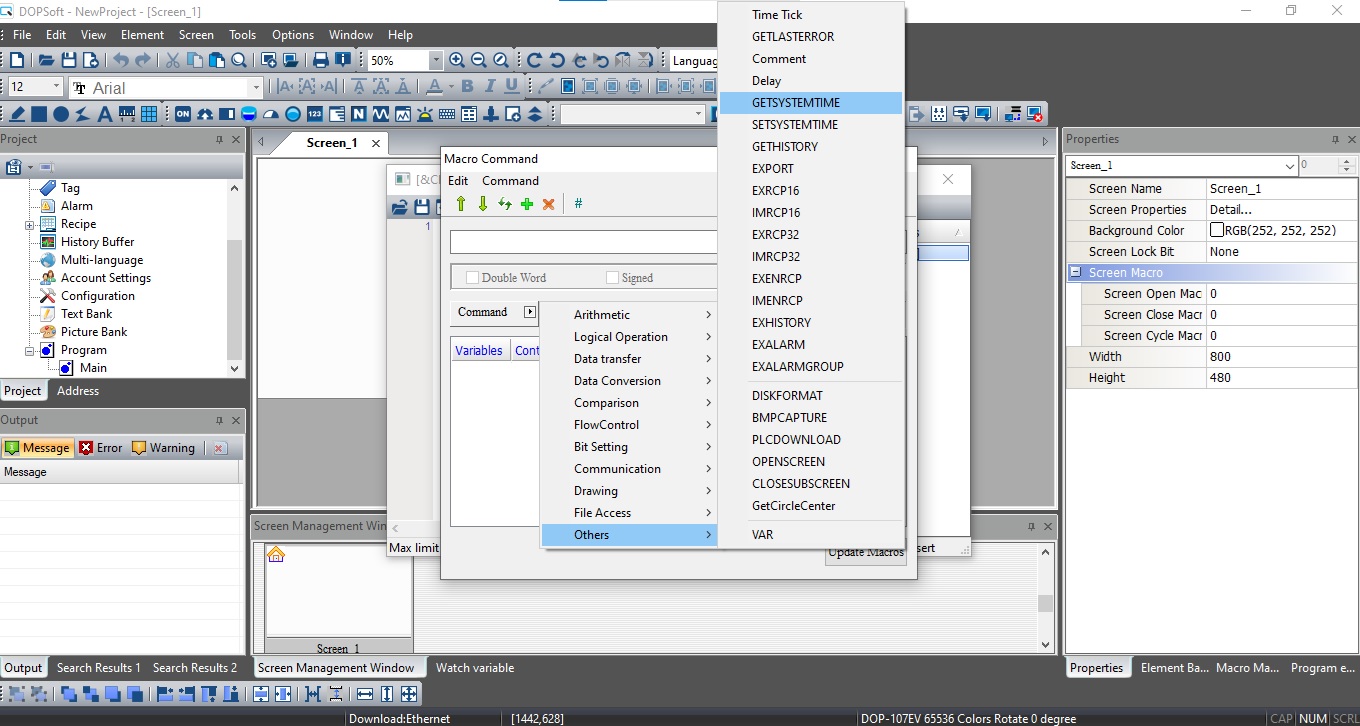
- Selecionar o “GETSYSTEMTIME” para escrever a hora e data da IHM para um memória interna:
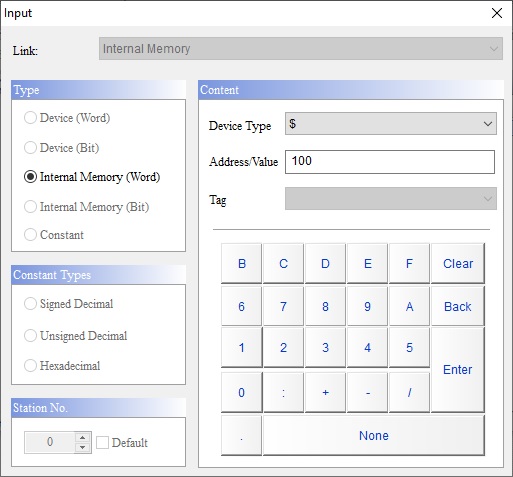
- Selecionar a memória interna:
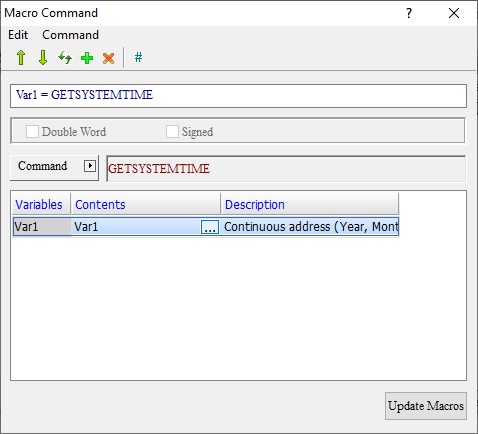
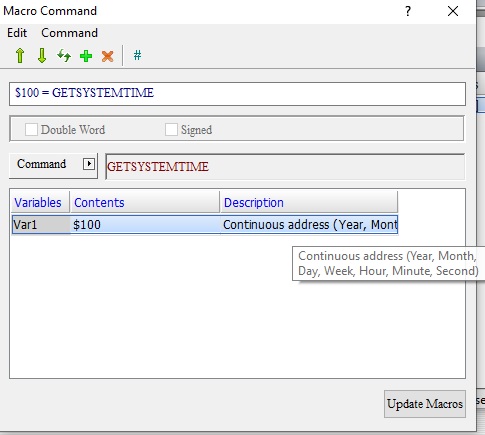
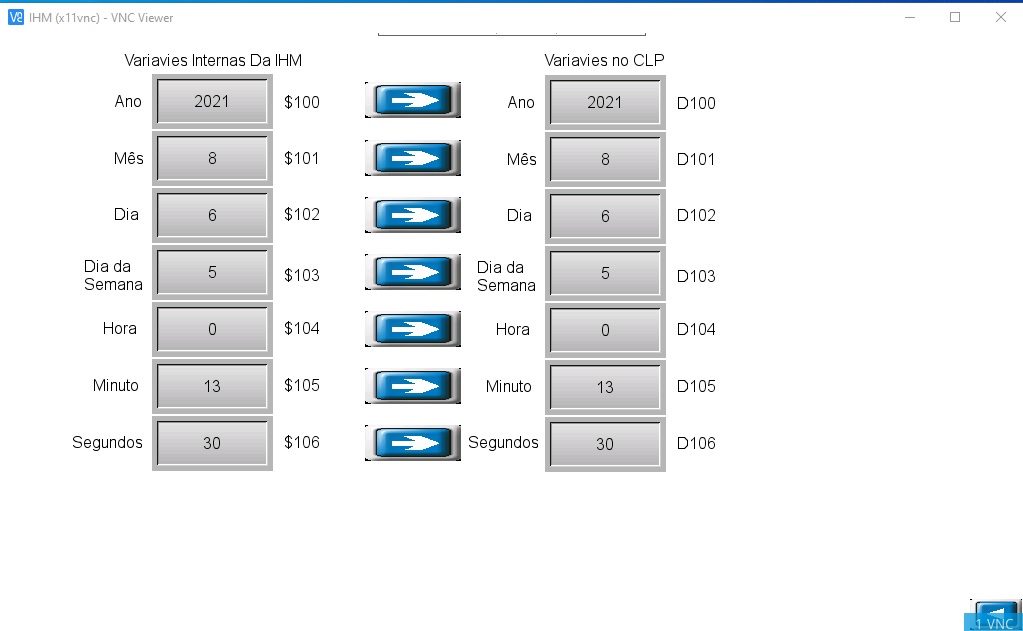
- Macro criada será enviado os dados de (Ano, Mês, Dia, Dia da Semana, Hora, Minuto e segundo) para as variáveis (D100, D101, D102, D103, D104, D105 e D106)
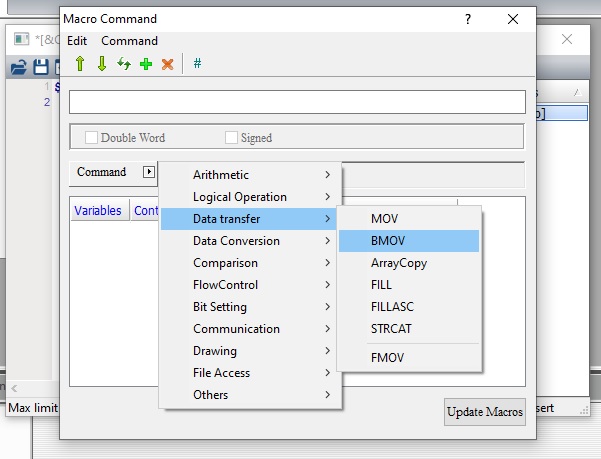
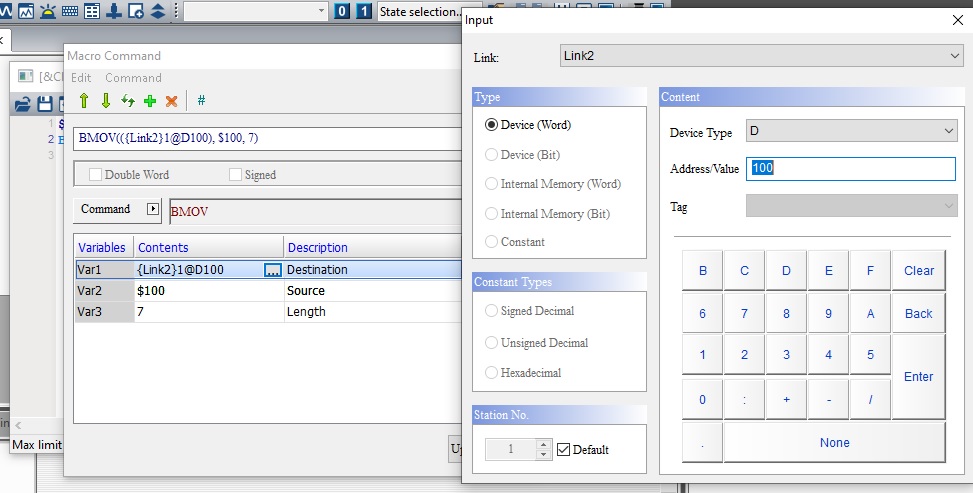
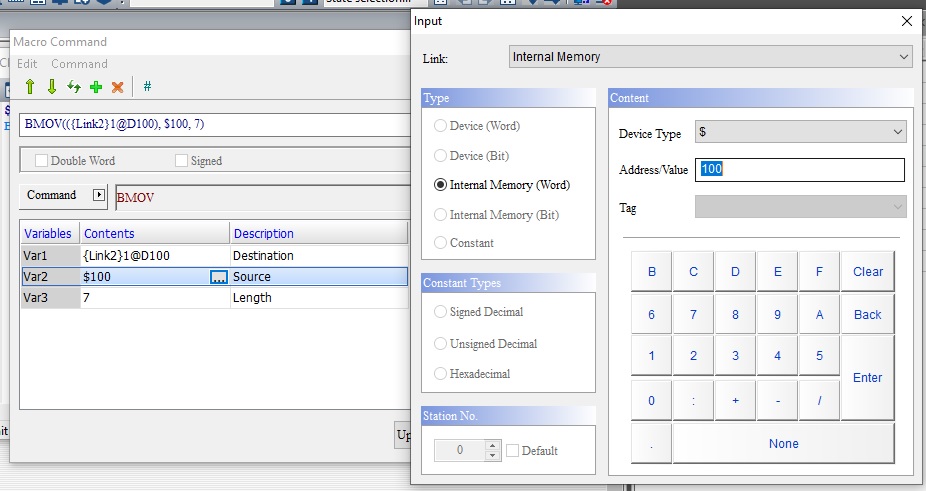
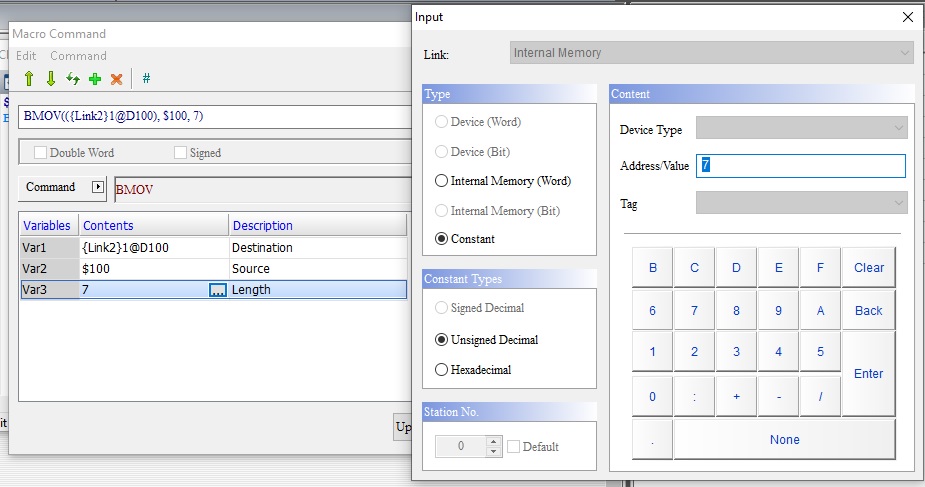
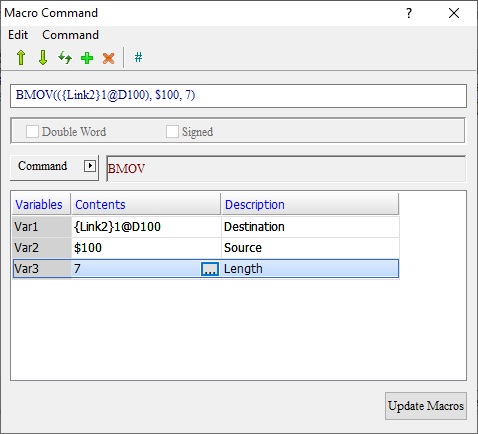
- Criar outra macro para mover os valores da D100~106 para uma variável do CLP, pode utilizar o bloco BMOV para enviar sequencial ou criar o bloco MOV para mover cada informação de forma individual:
- Com as macros criadas basta clicar no botão de “Upload” após
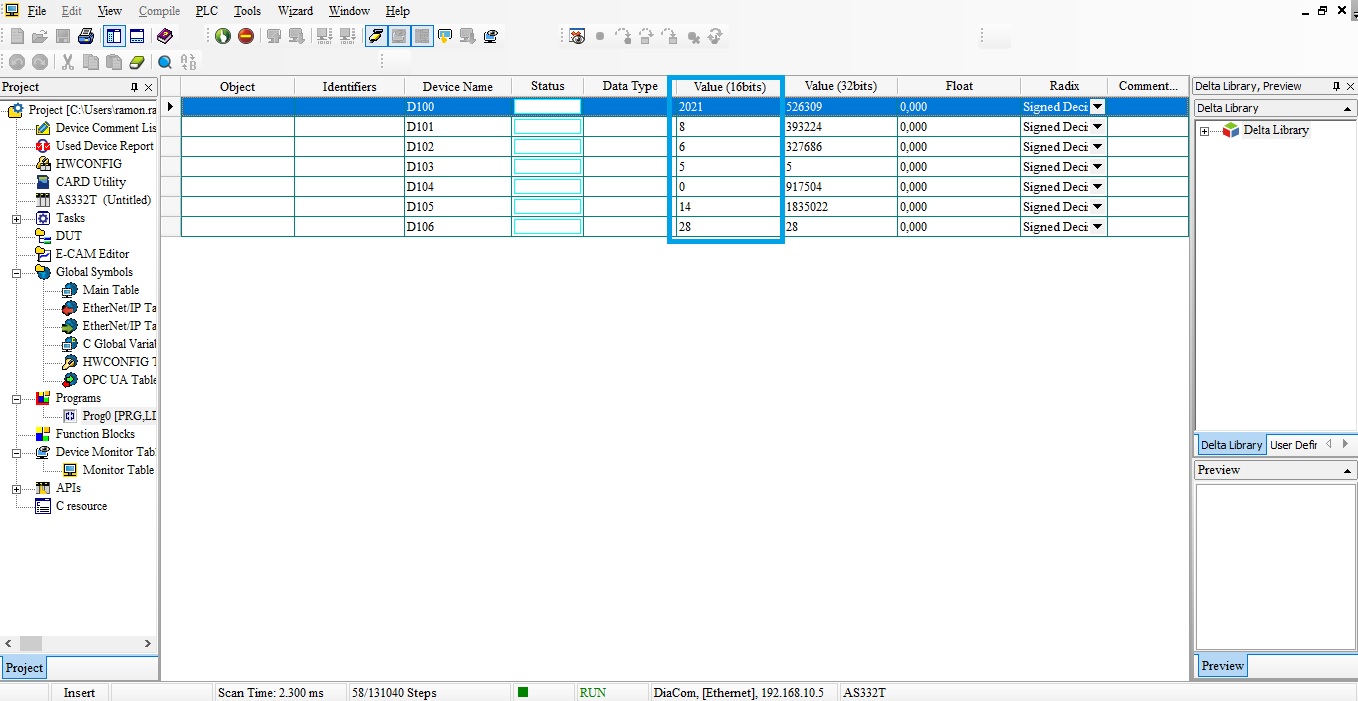
- Visualização da hora e data online com a IHM e com CLP:
ISPSoft online com o CLP:
para mais detalhes baixe o exemplo:
Na entrada analógica do servo drive é comum a presença de pequenos ruídos de tensão (mV). Na imagem abaixo nota-se que, mesmo sem ligação elétrica na entrada analógica, existe um pequeno sinal de tensão (mV) no comando de velocidade e torque.
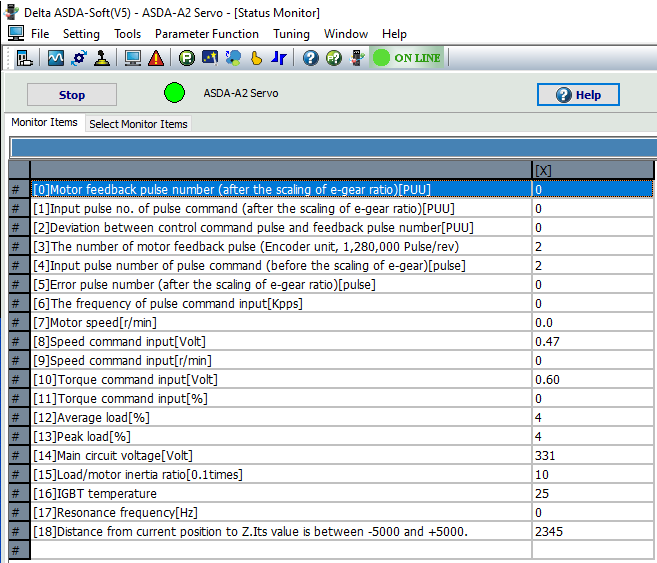
Para eliminar esse ruído, siga os passos a abaixo:
Comando de velocidade (Speed Command Input):
1. Retire todas as ligações elétricas da entrada analógica e deixe o servo desabilitado (Servo Off).
2. Ajuste o parâmetro P2-08 = 20 para habilitar a escrita no parâmetro P4-10.
3. Ajuste o parâmetro P4-10 = 1 (Execute analog speed input drift adjustment).
Comando de torque (Troque Command Input):
1. Retire todas as ligações elétricas da entrada analógica e deixe o servo desabilitado (Servo Off).
2. Ajuste o parâmetro P2-08 = 20 para habilitar a escrita no parâmetro P4-10.
3. Ajuste o parâmetro P4-10 = 2 (Execute analog torque input drift adjustment).
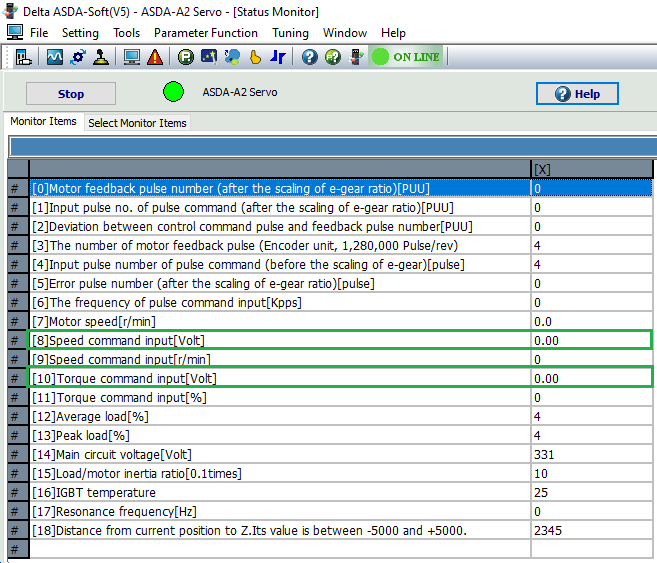
Após os ajustes, o ruído será eliminado.
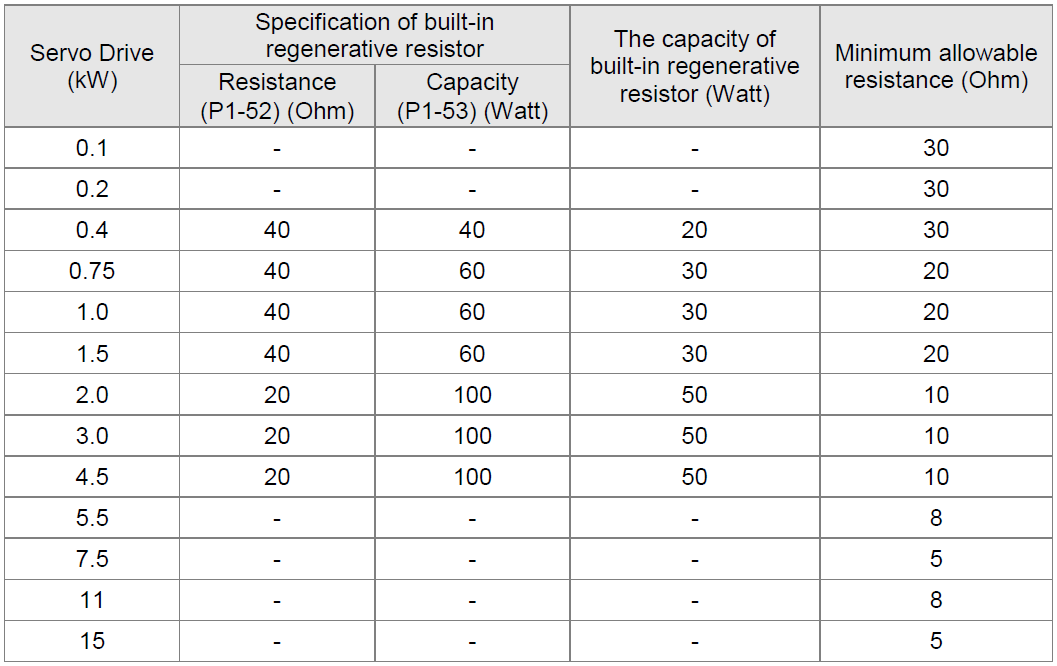
Quando uma falha, ALE05 (Erro de Regeneração) é detectada na unidade servo, indica que a energia regenerativa retornou da carga para o servo drive e excede a capacidade de processamento. Esta energia será transmitida para a capacitância do barramento CC e resultará no aumento da tensão. Quando a tensão sobe muito, o sistema servo precisa dissipar a energia extra usando um resistor regenerativo. O servo drive da série ASDA-A2 fornece um resistor regenerativo embutido como padrão de fábrica. Os usuários também podem conectar um resistor regenerativo externo se for necessária mais capacidade regenerativa. A tabela a seguir mostra as especificações do resistor regenerativo embutido do servo drive e a quantidade de poder regenerativo (valor médio) que ele pode processar.
Série ASDA-A2 220V
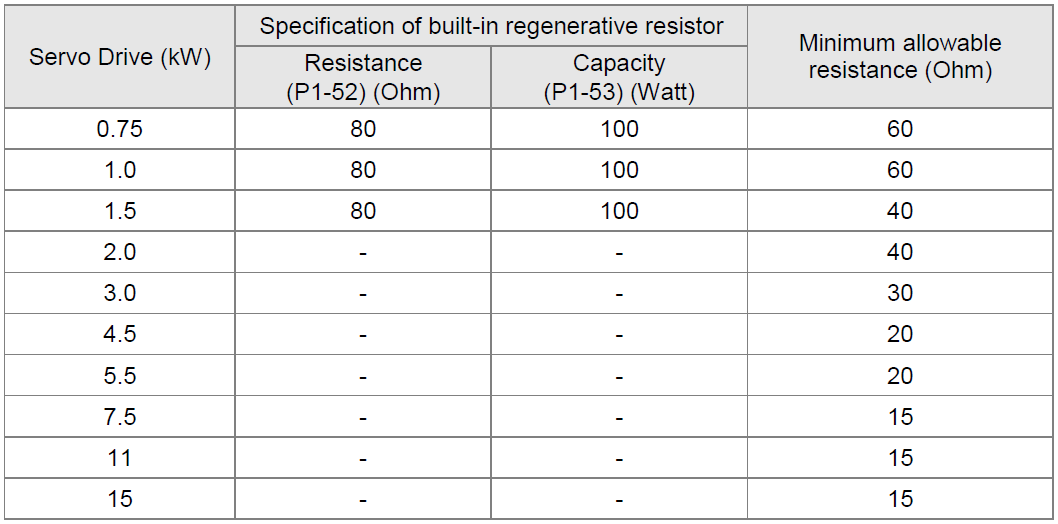
Série ASDA-A2 400V
Por favor, preste muita atenção às seguintes notas ao usar um resistor regenerativo.
- Certifique-se de que os valores de resistência (P1-52) e potência (P1-53) estejam corretamente definidos.
- Ao instalar um resistor regenerativo externo, certifique-se de que seu valor de resistência seja o mesmo que a resistência do resistor regenerativo embutido. Se combinar vários resistores regenerativos de pequena capacidade paralelamente para aumentar a capacidade do resistor regenerativo, certifique-se de que o valor de resistência do resistor regenerativo está em conformidade com as especificações listadas na tabela acima.
- Em geral, quando a quantidade de energia regenerativa (valor médio) que pode ser processada está abaixo da razão de carga nominal, a temperatura de resistência aumentará para 120°C ou mais (quando a regeneração ocorre continuamente). Por razões de segurança, a ventilação forçada é uma boa maneira de reduzir a temperatura dos resistores regenerativos. Também recomendamos o uso de resistores regenerativos com interruptores térmicos. Quanto às características de carga dos resistores regenerativos, consulte o fabricante.
- Ao usar um resistor regenerativo externo, conecte-o a P e C e certifique-se de que o circuito entre P e D esteja aberto. Recomendamos o uso de resistores regenerativos externos com valores de resistência que seguem a tabela acima (Especificações de Resistores Regenerativos Embutidos).
Referência: Manual do usuário – ASDA-A2, página 50 (2.8 Selection of Regenerative Resistor).
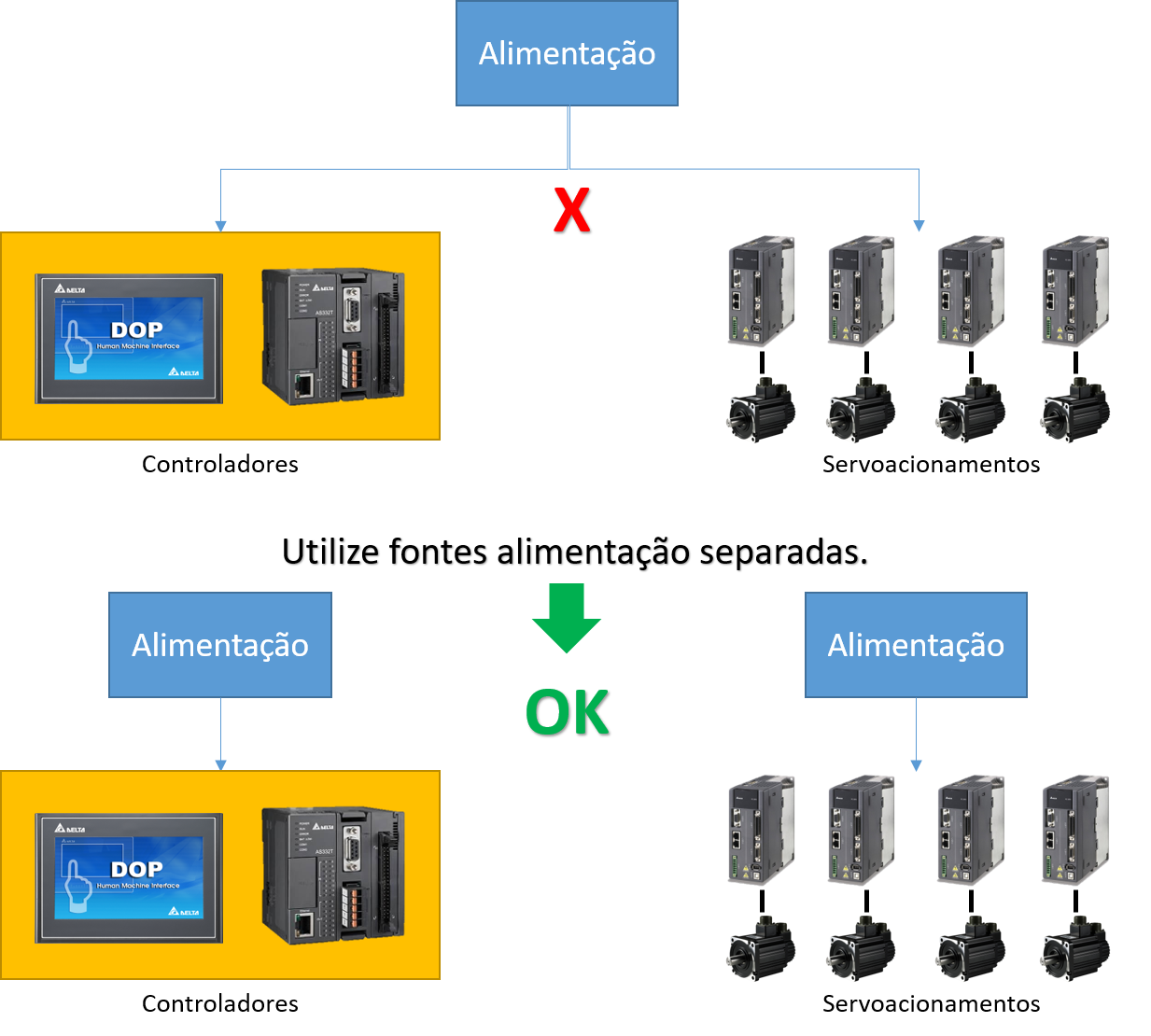
Quando um servoacionamento CA é comutado para “Servo On”, ele gera ruídos de alta ou baixa frequência durante a operação e pode interferir com equipamentos periféricos (Ex.: CLP, IHM e etc.) através de condução ou radiação, o que muitas vezes resulta em erros de comunicação ou operações anormais. Os seguintes métodos podem resolver esse problema:
- Potência separada do servoacionamento e controlador uma vez que o (EMI) gerado pelo servo geralmente influência nos controladores, como Interfaces Homem Máquina (IHM) e Controladores Lógicos Programáveis (CLP) através do circuito de energia, recomenda-se, portanto, a separação da energia do servoacionamento e dos controladores para reduzir o efeito (EMI).
- Blindagem de cabo para minimizar interferência eletromagnética. Recomenda-se utilizar cabo de par trançado blindado para comunicações. Isso ajudará a reduzir o ruído (EMI) nos controladores por radiação ou condução.
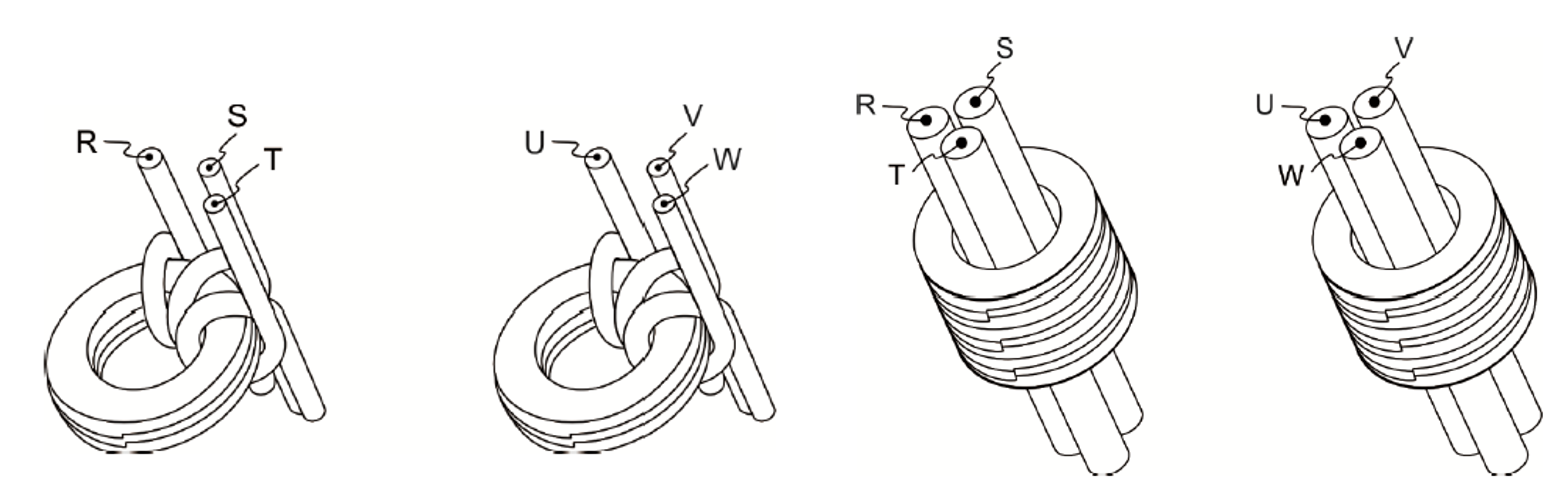
- Enrole o ferrite nos terminais de conector de energia RST e UVW do servoacionamento CA. Quando o sistema de servo CA é comutado para “Servo On”, a interferência (EMI), como sinais comuns de alta frequência, aparecem. O uso de anéis ímãs de ferrite reduz efetivamente a interferência de sinal de alta frequência em cabos de alimentação, cabos de sinal e conectores, para que sinais normais possam ser transmitidos.
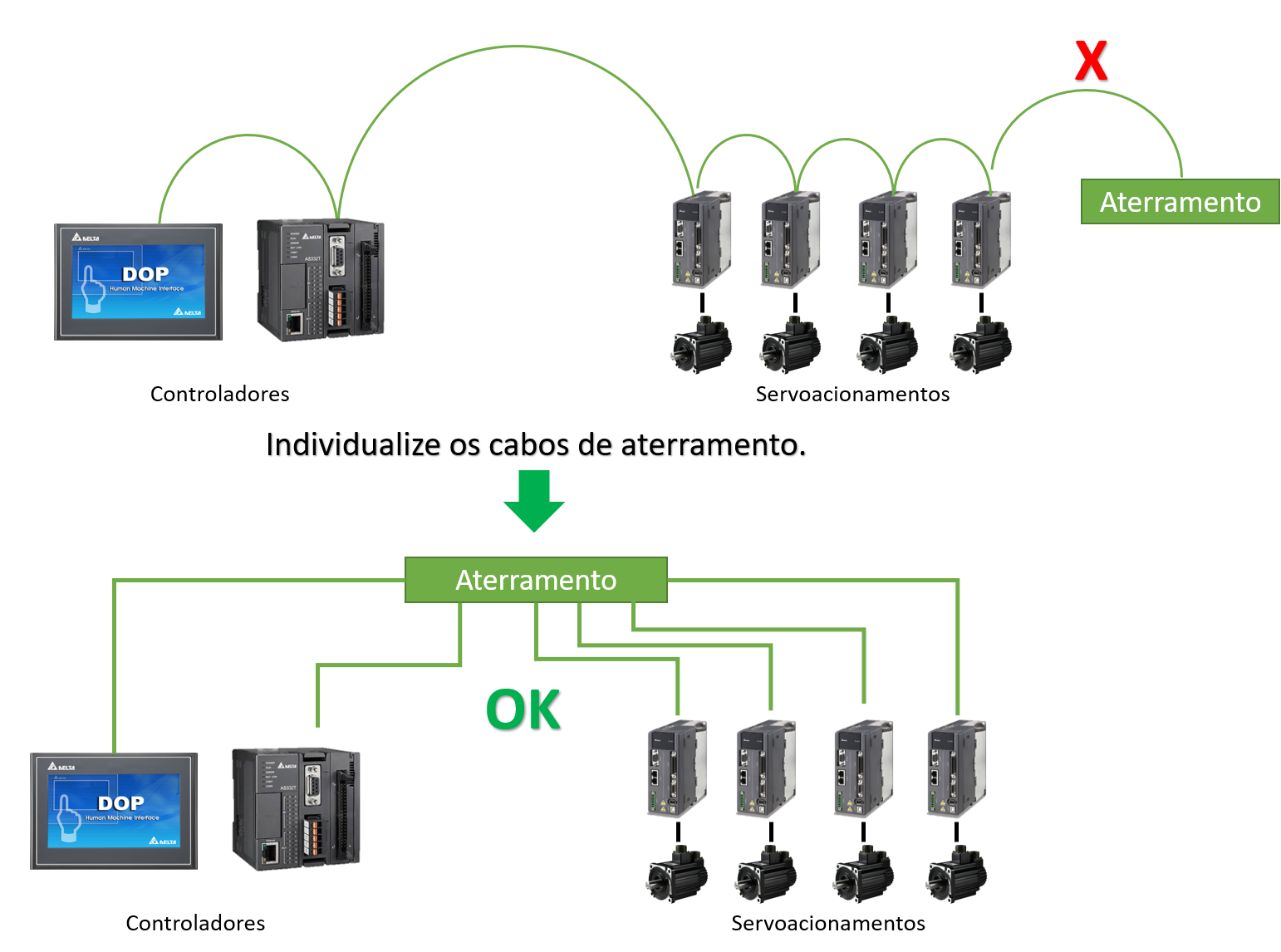
- Dispositivos devidamente conectados ao aterramento (por exemplo, placas de servo drives AC) frequentemente experimentam fugas elétricas que interferem com equipamentos periféricos através de objetos metálicos, como fios e parafusos. A melhor maneira de evitar esse problema é usar um cabo de terra para cada servo drive CA e um para cada controlador para se conectar ao terminal terra. A razão é que se os motores dos servo CA e os controladores estiverem conectados por um único cabo de terra ao terminal de aterramento, a fuga elétrica afetará imediatamente outros equipamentos periféricos através do cabo e criará uma interferência maior; em segundo lugar, a área do último contato no fio terra é muito pequena para impedir efetivamente que as fugas elétricas interfiram nos outros dispositivos.
Há duas fontes de comandos de velocidade: uma é a entrada externa de tensão analógica, e a outra são os parâmetros internos. Os registros do Servo Drive da Delta permitem que os usuários configurem 3 tipos diferentes de comandos de velocidade, que são os parâmetros internos de P1-09, P1-10 e P1-11 (Unidade: 0.1rpm). Ele pode ser comutado pelos sinais SPD0 e SPD1 no conector CN1, explicados na tabela a seguir:
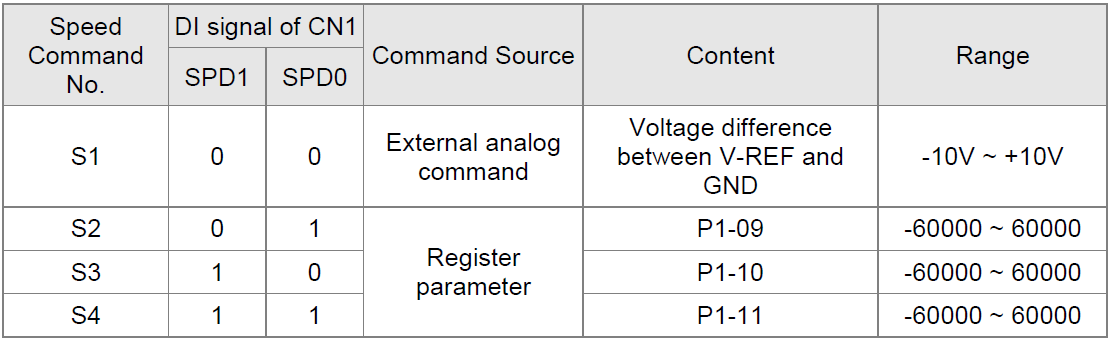
Status do SPD0 e SPD1: “0” é circuito aberto, “1” é circuito fechado. Quando SPD0=SPD1=0, e se o modo de controle é o “Sz”, então o comando é 0. Assim, se os usuários não precisarem usar a tensão analógica como comandos de velocidade, eles podem optar pelo modo “Sz” para evitar uma mudança causada pelo ruído na tensão analógica.
Se o modo for “S”, então o comando é via referência analógica (REF). A tensão de entrada analógica e a diferença de tensão entre GND tem o intervalo -10V a +10V. A velocidade correspondente à tensão é ajustável em P1 – P40.
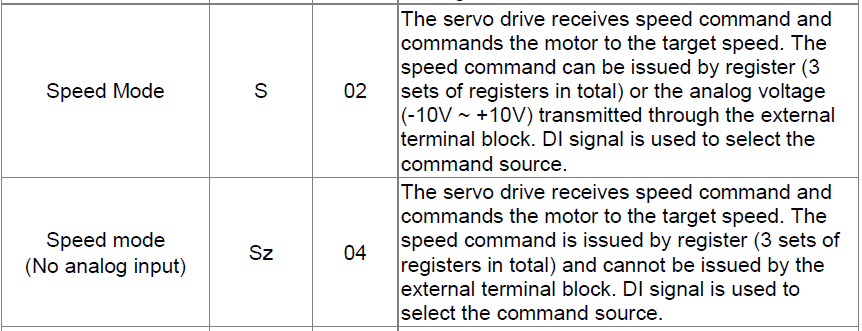
Referência: Manual do usuário – ASDA-A2, páginas 196 e 220.
O sinal de freio (BRKR) controla relé auxiliar para fornecer potência ao freio. Veja a operação abaixo para definir as funções e a fiação da saída digital (DO).
- Configuração da saída digital (DO): Defina o valor do parâmetro da DO para 0x08 (BRKR). Pode-se ajustar os atrasos de liberação e acionamento do freio nos parâmetros P1-42 e P1-43.
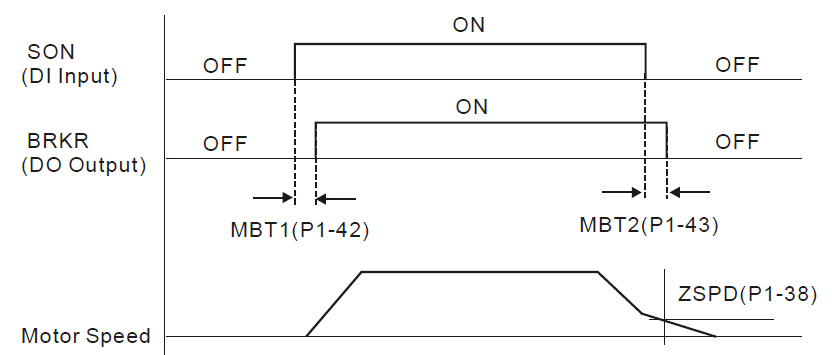
- Consulte o diagrama de interligações elétricas abaixo para usar o freio eletromagnético.
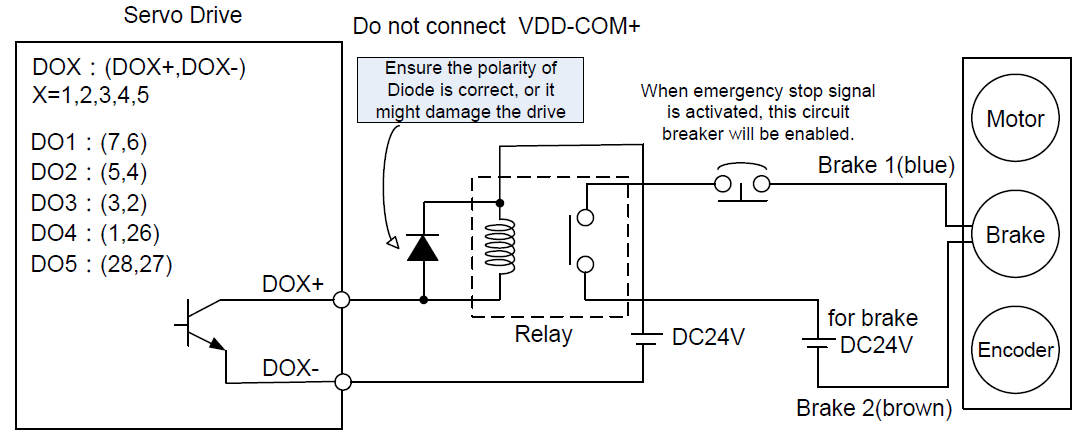
Notas:
- A bobina do freio não tem polaridade.
- Não utilize a potência do freio e a potência de controle (VDD) ao mesmo tempo.
Referência: Manual do usuário – ASDA-A2, página 257 (6.6.4 The Use of Brake).
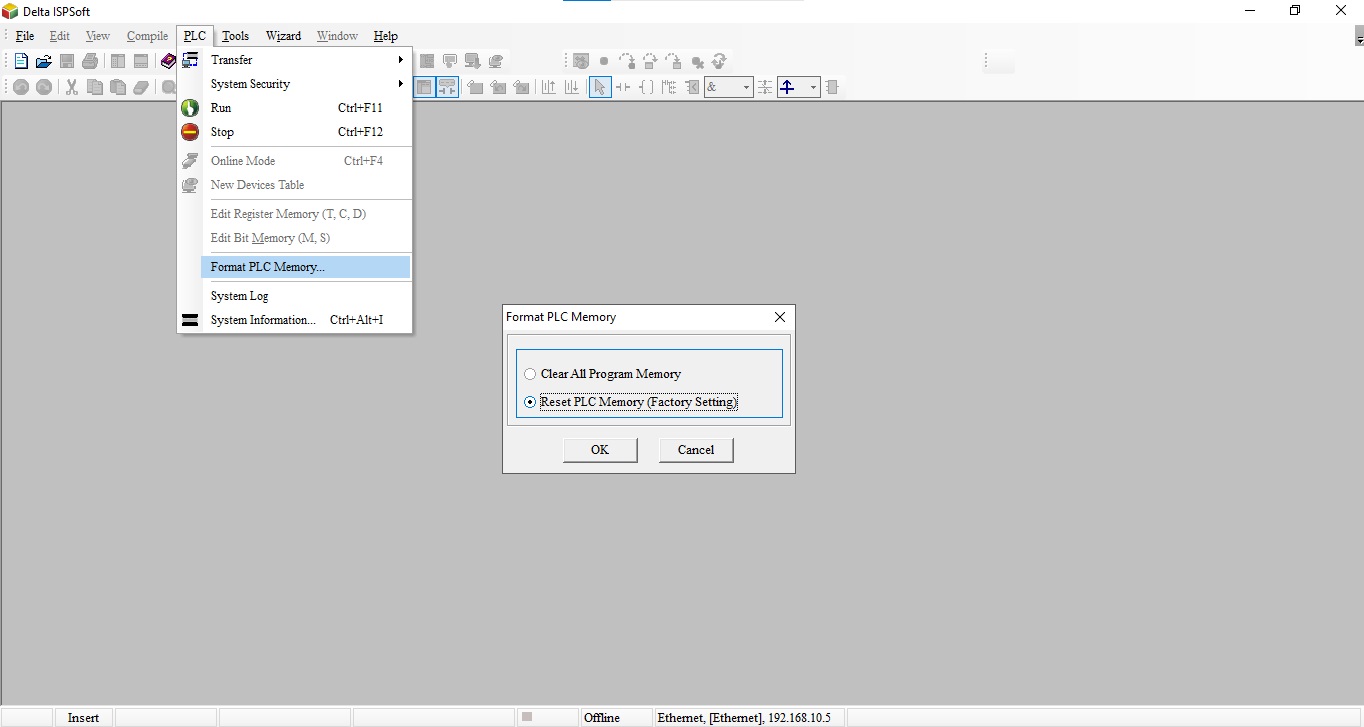
Abra o ISPSoft (passo 1) -> “Communication Settings” Selecione a comunicação com o CLP (passo 2) -> PLC “Format PLC Memory” pressione Ok (passo 3) -> o CLP voltará para a configuração de fábrica, tire a alimentação e retorne wwwà alimentação ao CLP. A senha e o programa seriam todos apagados.
- Abra ISPSoft:
- Comunicação e Seleção da comunicação:
- PLC formatar aos padrões de fabrica
O formato de comunicação do controlador lógico programável série DVP pode ser alterado por meio de registros especiais. Em determinadas aplicações o usuário pode esquecer o formato de comunicação, alterado e descarregando o programa ao CLP, resultando na desconexão entre um computador e a série DVP. Quando isso acontece, o usuário pode restaurar a conexão executando as seguintes etapas:
- Corte a energia do controlador lógico programável série DVP altere a chave RUN / STOP para STOP conforme mostrado na imagem abaixo.
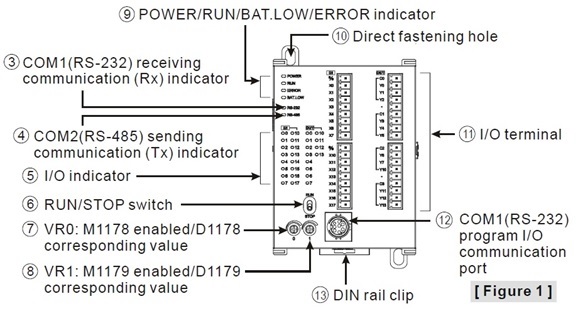
- Reinicie o controlador lógico programável DVP. Neste momento, o formato de comunicação da série DVP mudará para o valor predefinido: 9600, 7, Even, Stop bit = 1, station number = 1. O usuário pode então modificar o formato de comunicação através do software WPLSoft.
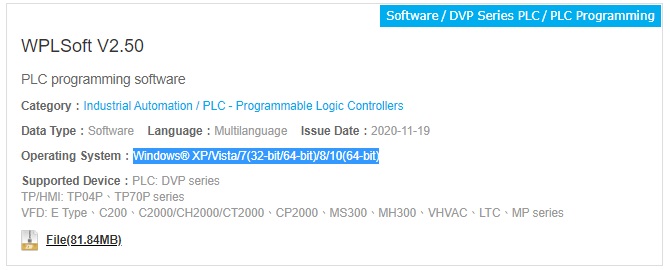
Atualmente, WPLSoft e ISPSoft só podem ser operados no sistema operacional Windows, e nenhum dos softwares são compatíveis com o sistema operacional Linux. A única maneira de usar WPLSoft, ISPSoft ou algum outro software de Automação Industrial Delta, em qualquer sistema operacional diferente do Windows (por exemplo, Mac, Linux), é utilizando maquinas virtuais para executar o sistema operacional Windows em paralelo ao sistema operacional da máquina física. Além disso, sugerimos que você instale o ISPSoft em vez do WPLSoft, pois o ISPSoft é o novo software de programação com mais funções
WPLSoft:
ISPSoft:
Consulte os seguintes grupos de parâmetros de aplicação.
Atualmente, as aplicações industriais suportadas são para:
- Definido pelo Usuário (pré-seleção)
- Compressores,
- Ventiladores,
- Bomba e unidade de tratamento de ar,
- Transportadoras
- Máquinas de Ferramentas
- Embalagens
- Têxtil
- Logística
- Aplicação de Tensão PID
- Aplicação de Tensão PID + Master + Auxiliar + Frequência
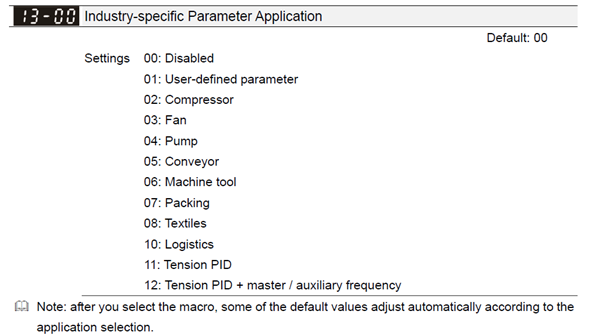
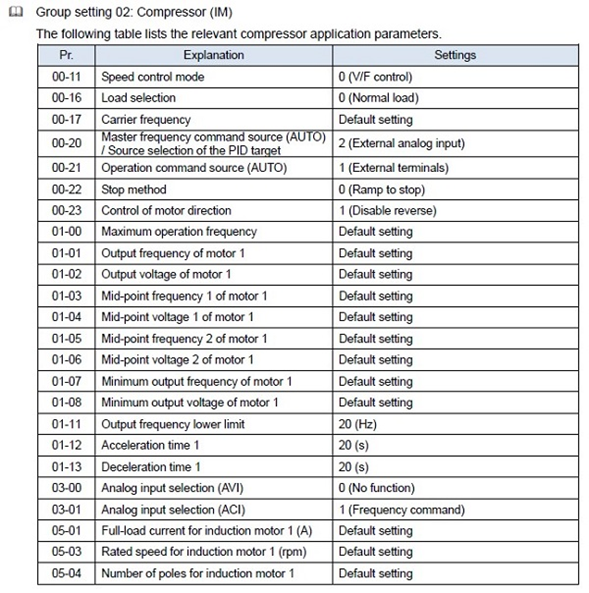
Por exemplo, se você selecionar o parâmetro da indústria “2”, os parâmetros do compressor embutido serão configurados.
A função de freio CC serve para induzir uma tensão contínua no inversor com um objetivo de travar os polos do motor de indução e assim frear a movimento do motor.
A função de freio geralmente é usada na desaceleração, porem também pode ser usada na aceleração em aplicações de elevação.
Para executar a função de frenagem necessita de 3 informações:
1 – Porcentagem de corrente a ser injetada
2 – Tempo de injeção
3 – Frequência de início da injeção
Consulte as configurações de parâmetro a seguir para frenagem DC.

Este parâmetro define o nível da saída de corrente de frenagem DC (em porcentagem) para o motor durante a partida e a parada. Quando você define a porcentagem da corrente de frenagem DC, a corrente nominal é considerada 100%. Comece com um nível baixo de corrente de frenagem DC e aumente-o lentamente até que o torque de frenagem adequado seja alcançado. No entanto, para evitar queimar o motor, a corrente de frenagem DC NÃO pode exceder a corrente nominal. Portanto, NÃO use o freio DC para substituir um freio mecânico, caso contrário, podem ocorrer ferimentos ou acidentes.

Durante a aceleração se a inercia ou se o peso da carga for grande o motor pode na aceleração não ter força no início do devido a forças externas ou à inércia do próprio motor. Esse parâmetro define o tempo que a corrente será injetada na partida do motor (aceleração). Este parâmetro emite corrente DC, gerando torque para forçar ou na aceleração para obter uma partida estável antes da operação do motor. Este parâmetro determina a duração da saída de corrente de frenagem DC para o motor. Definir este parâmetro como 0,0 desativa o freio DC na inicialização. Se você usar o inversor com o motor girando, isso pode causar danos ao motor ou acionar a proteção do inversor devido ao excesso de corrente.

O motor pode continuar girando depois que a rampa de desaceleração acaba, mesmo o inversor ter parado o movimento o motor pode continuar girando devido a forças externas ou à inércia do próprio motor. Esse parâmetro define o tempo que a corrente será injetada. Este parâmetro emite corrente DC, gerando torque para forçar a parada do motor na desaceleração.
Este parâmetro define o tempo que a corrente será injetada, gerando torque para forçar a parada do inversor depois que o inversor interrompe a saída para garantir que o motor pare. Definir este parâmetro como 0,0 desativa o freio DC na parada. Se você usar o inversor com o motor girando, isso pode causar danos ao motor ou acionar a proteção do inversor devido ao excesso de corrente.

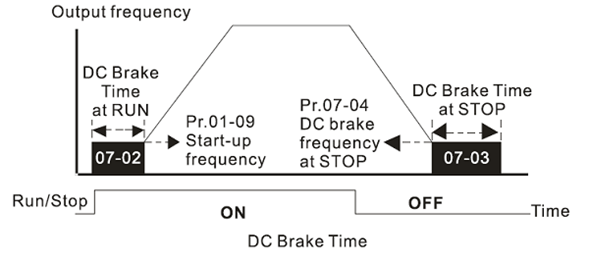
Este parâmetro determina o início da frequência que será injetada no inversor. Quando esta configuração é menor que Pr.01-09 (Frequência de inicialização), a frequência de partida do freio DC começa na frequência mínima.
O diagrama de sequência do freio DC é o seguinte.
Use o freio DC antes de ligar o motor quando a carga é móvel na parada ou quando há elevação, ventiladores e bombas. O motor está no status de operação livre e em uma direção de rotação desconhecida antes da partida do inversor. Execute o freio DC antes de ligar o motor.
Use o freio DC na parada quando precisar frear o motor rapidamente ou controlar o posicionamento ou quando a força da desaceleração não for suficiente para parar a inercia do motor, como com guindastes ou máquinas de corte.
Além de ter acesso a informações como posição, velocidade, corrente, carga e outras, a função Scope também fornece o seguinte conteúdo:
- Variáveis (Variáveis de monitoramento): Disponível para inserir o código de variáveis de monitoramento. A unidade está em valores decimais de 0 a 127. Para obter mais detalhes, consulte no manual ” Monitoring Variable Table “.
- Parâmetros (parâmetros do Servo): Disponível para parâmetros de entrada que estão definidos para serem lidos. Existem dois tipos de parâmetros: 16Bit e 32Bit. Para parâmetros de leitura em 32Bit, selecione “32Bit”. Como a configuração padrão dos dados do canal é de 16Bit, o ASDA-Soft fecha automaticamente o outro canal para suportar o canal selecionado se o usuário optar por 32Bit para estender a quantidade de um canal.
O exemplo a seguir mostra como configurar o sistema: Os canais 1 e 3 são definidos como um grupo, e os Canais 2 e 4 são definidos como o outro grupo. O exemplo mostra que quando o Canal 1 é definido em 32Bit, o Canal 3 é automaticamente fechado para suportar os 32bits do Canal 1.
- 【CAN】 CANopen (CANopen object dictionary): Available to input the data of the CANopen object which is set to be read. Users can input the data’s appointed site (Index) and the appointed flag site (Sub-Index). The following example shows when the Index is set to 6040h (Controlword) and the Sub-Index is 0.
- CANopen (Lista de variaveis CANopen): Disponível para inserir os dados do objeto CANopen que está definido para ser lido. Os usuários podem inserir o dado indicado (Index) e (Subíndice). O exemplo a seguir mostra quando o Índice é definido para 6040h (Palavra de Controle) e o Subíndice é 0.
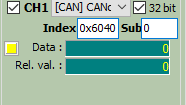
(A ADR tem um propósito específico e apenas para uso interno)