(1) Antes de usar as unidades de servo Delta com a interface de comunicação EtherCAT, leia os manuais relacionados (consulte o site da Delta).
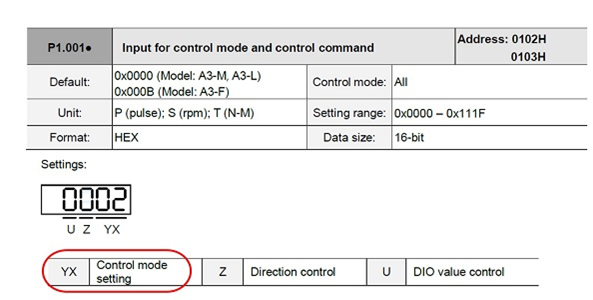
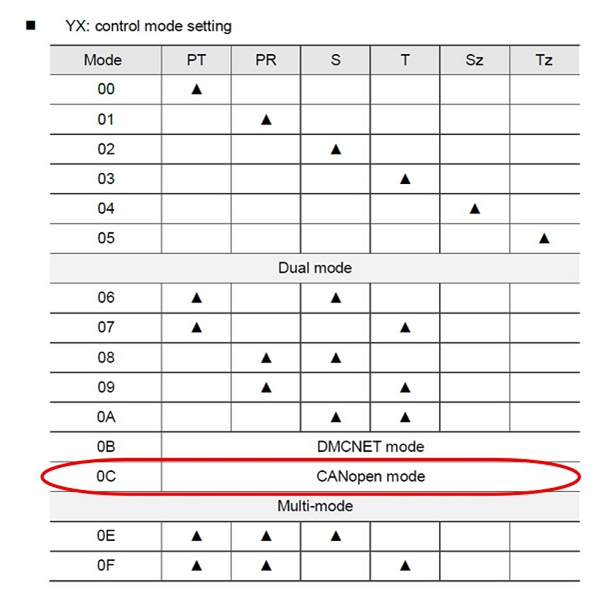
(2) P1-01 ou P1.001 (configuração do modo de controle): 0x0C. O servo Delta em modo de comunicação EtherCAT CoE “CANOpen Over EtherCAT”, então selecione o modo 0C.
(3) P3-12 (suporte canopen/DMCNET): O parâmetro determina se a tabela de comunicação a seguir mantém as mesmas configurações.
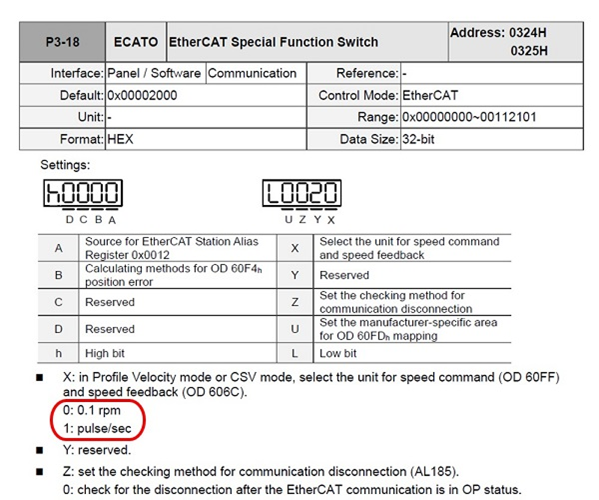
(4) P3-18 (EtherCAT Special Function Switch): Define a unidade de velocidade para o mestre ler o comando servo.
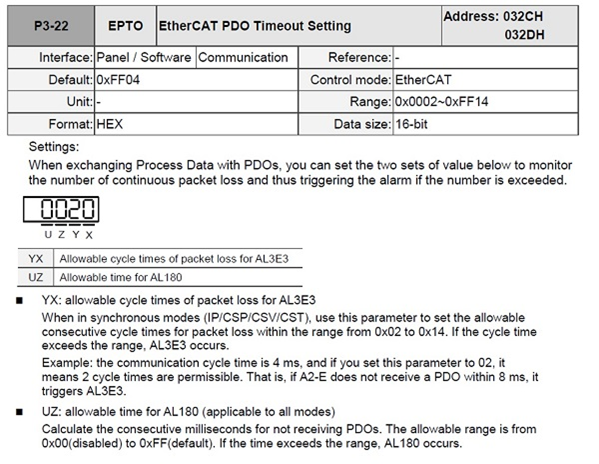
(5) P3-22 (EtherCAT PDO Timeout Setting): Ajuste este parâmetro para alterar tempo de TimeOut dos alarmes relacionados à comunicação ECAT (AL3E & AL180). Por favor, mantenha o valor padrão se não houver alarmes ECAT.