(1) Antes de utilizar las unidades servo Delta con interfaz de comunicación EtherCAT, lea los manuales relacionados (consulte el sitio web de Delta).
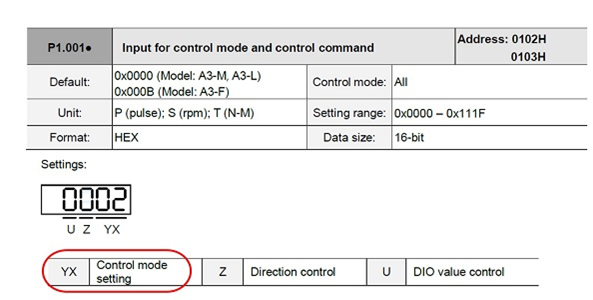
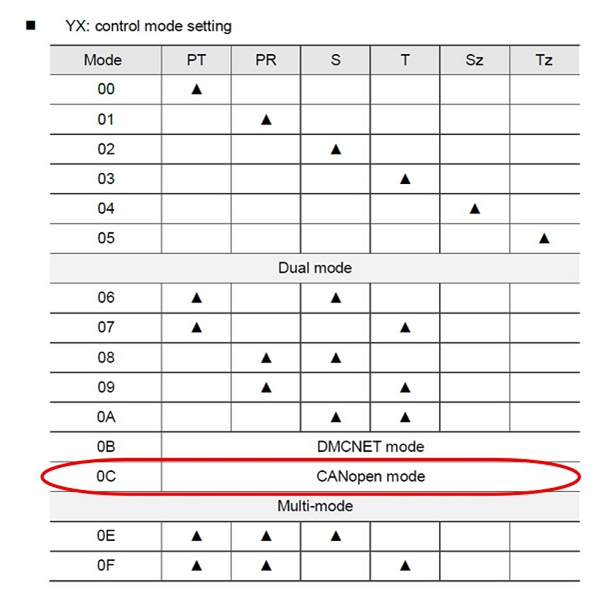
(2) P1-01 o P1.001 (ajuste del modo de control): 0x0C. Servo delta en modo de comunicación EtherCAT CoE "CANOpen sobre EtherCAT", luego seleccione el modo 0C.
(3) P3-12 (soporte canopen / DMCNET): El parámetro determina si la siguiente tabla de comunicación mantiene la misma configuración.
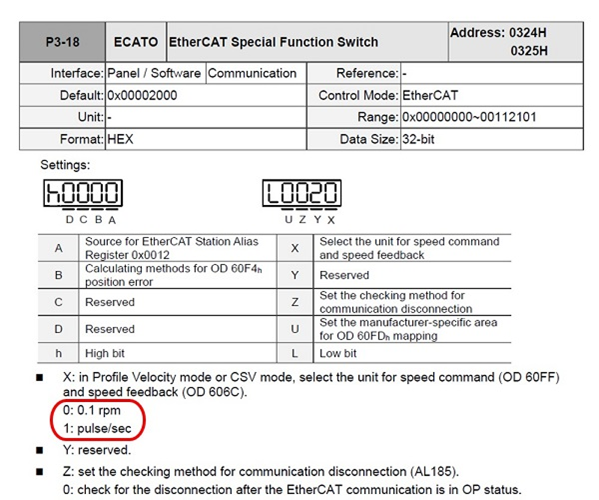
(4) P3-18 (Interruptor de función especial EtherCAT): establece la unidad de velocidad para que el maestro lea el comando del servo.
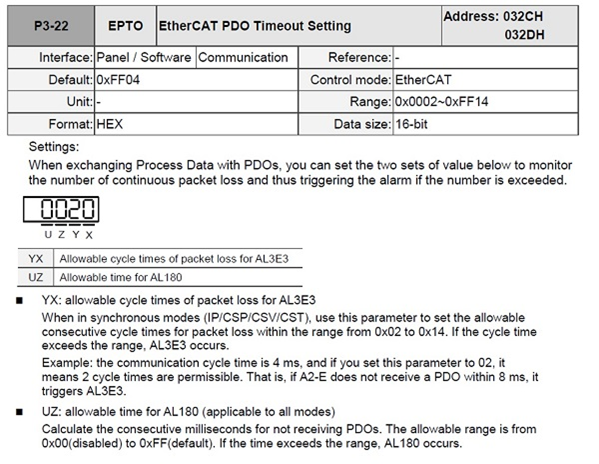
(5) P3-22 (Configuración de tiempo de espera de EtherCAT PDO): establezca este parámetro para cambiar el tiempo de espera de las alarmas relacionadas con la comunicación ECAT (AL3E y AL180). Mantenga el valor predeterminado si no hay alarmas ECAT.