
Introdução
Depois de instalado o cabo do servomotor, o cabo do encoder e ter alimentado a potência e comando do driver (A2 ou B2), recomenda-se acionar o modo JOG que possibilita uma movimentação manual com velocidade reduzida para verificar a movimentação do eixo e a trajetória do aparato mecânico acoplado no mesmo. Esse teste pode ser feito diretamente no display do driver sem a necessidade de ligar as entradas digitais
Teste em modo JOG
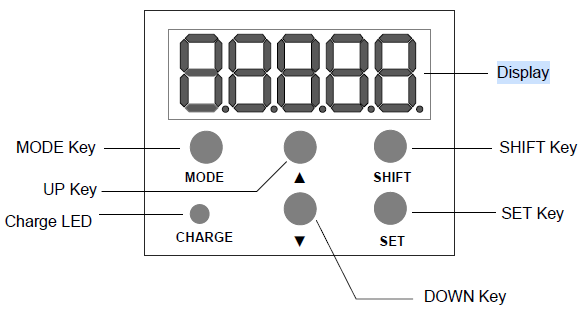
1 – No display do driver aparte o botão [MODE] para acessar os parâmetros.
Nota: Utilize a tecla [SHIFT] para alterar o grupo para 2 e as teclas para alterar o parâmetro. Utilize a tecla [SET] para alterar os valores dos parâmetros.
2 – Acesse o parâmetro P2-30 e coloque o valor igual a 1 (Servo ON). Isso fará com que o servomotor fique energizado. Perceberá que servomotor fará um pequeno ruido e o eixo ficará rígido. Para desativar, volte ao valor 0 (Servo OFF).
3 – Agora entre no parâmetro P4-05 e ajuste a velocidade do JOG. Por padrão, o JOG vem com o valor 20. Após apertar a tecla set, aparecerá no display a palavra [- JOG -]. Agora utilize as teclas para movimentar o eixo do servomotor no sentido horário e anti-horário.
4 – Execute os movimentos para verificar se haverá alguma colização e se o servomotor está respondendo aos comandos.
Notas:
- Se o servomotor não rodar, verifique as ligações UVW do cabo de potência.
- Se o servomotor rodar de forma anormal, verifique os cabos UVW estão na sequência correta de ligação.
- Se o alarme AL011 aparecer, verifique se o servomotor é compatível ao modelo do driver e o conector e cabo do encoder.
- Caso já tenha verificado os itens acima e o servomotor continua se comportando de forma anormal (vibração, ruídos, disparo…), realize o auto tuning off-line.