
Introdução
Para aumentar a estabilidade do sistema Servo, é necessário ajustar os ganhos do servomotor. A função Auto Gain Tuning (Auto Ajuste dos Ganhos) fornece algumas ferramentas para ajudar os usuários a ajustar os valores de ganho corretamente.
Existem dois métodos, o Auto tuning estático e dinâmico. No estático estimasse a [Ratio of Inertia], [Bandwidth] e [Rigid Holding] e computa-se os valores, já no modo dinâmico, a [Relação de Inércia] será estimada através de movimentos com a carga acoplada no eixo do servomotor.
[Bandwidth] representa a resposta de frequência, [Ratio of Inertia] representa a razão de carga inércia com relação à inércia motora, e [Rigid Holding] representa as configurações de rigidez.
Séries aplicáveis: A2, B2 e M.
Nota: Existem casos em que o servomotor dispara ou vibra muito quando habilitado (Servo ON). Nesse caso, faça o Auto Tuning Estático primeiro. Depois faça movimentos de JOG para verificar se o servomotor está normal. Após isso, pode-se fazer o Auto Tuning Dinâmico.
Auto Tuning Dinâmico (On-line)
Selecione [Tools] > [Auto Gain Tuning] na barra de menus ou clique no ícone diretamente na barra de ferramentas para abrir a janela de Auto tuning, veja a imagem abaixo.
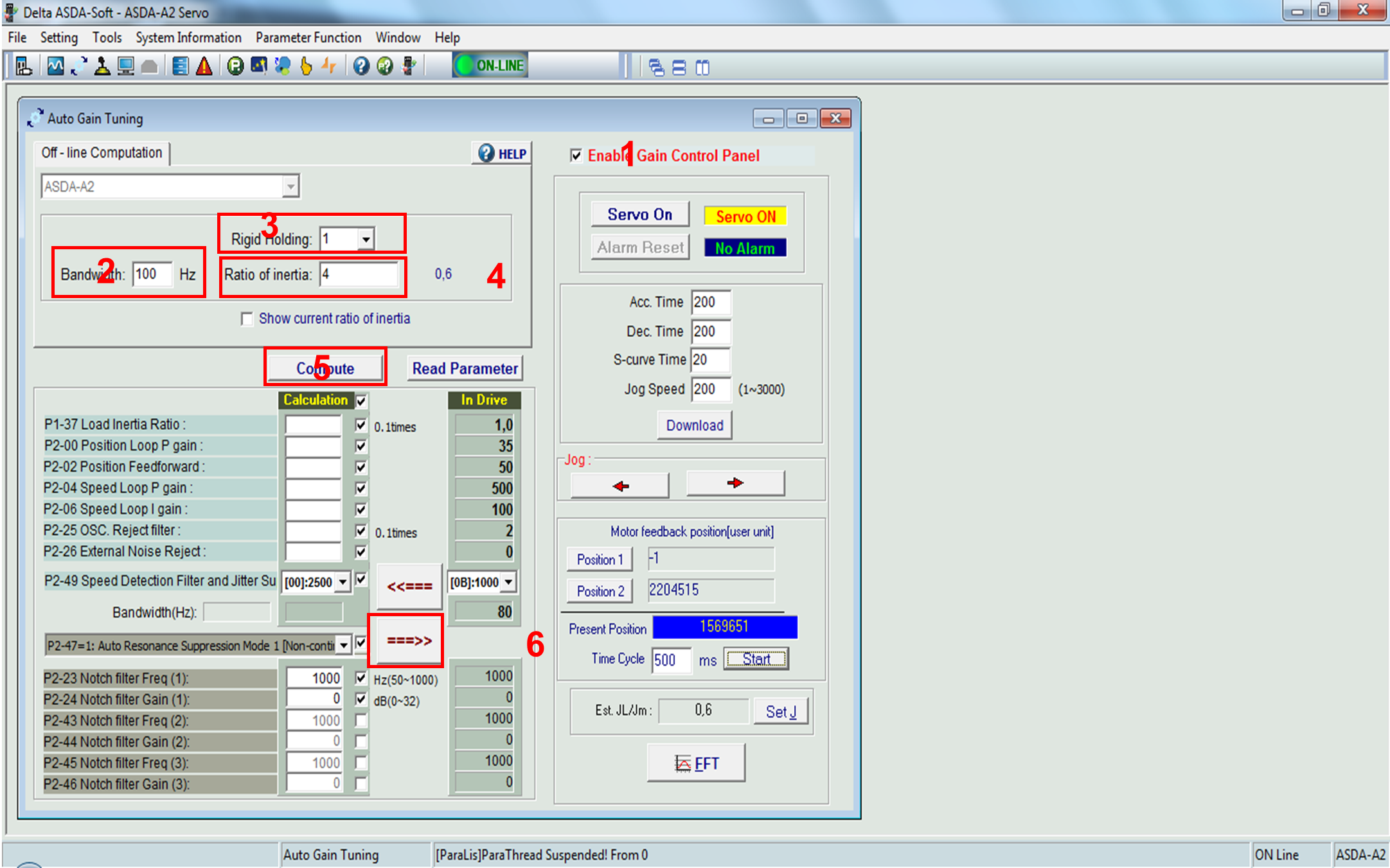
1 – Selecione a caixa [Enable Gain Control Panel].
2 – Ajuste o [Bandwidth]. O valor recomendado é de 100Hz.
3 – Ajuste o [Rigid Holding] de acordo com a aplicação.
4 – Ajuste a [Ratio of Inertia] de acordo com o valor calculado.
5 – Faça o cálculo dos ganhos pressionando [Calculate]. Perceba que os valores dos parâmetros serão preenchidos com o novo valor.
6 – Faça o download dos parâmetros com os ganhos para o servo driver pressionado [===>>]. Aceite as janelas de confirmação.
7 – Após esse procedimento o Auto tuning estático estará completo. Desmarque a caixa [Enable Gain Control Panel] e termine de parametrizar o driver.
Auto Tuning Estático (Off-line)
Selecione [Tools] > [Auto Gain Tuning] na barra de menus ou clique no ícone diretamente na barra de ferramentas para abrir a janela de Auto tuning, veja a imagem abaixo.
1 – Selecione a caixa [Enable Gain Control Panel].
2 – Ajuste o [Bandwidth]. O valor recomendado é de 100Hz.
3 – Ajuste o [Rigid Holding] de acordo com a aplicação.
4 – Ajuste a [Ratio of Inertia] de acordo com o valor calculado.
5 – Faça o cálculo dos ganhos pressionando [Calculate]. Perceba que os valores dos parâmetros serão preenchidos com o novo valor.
6 – Faça o download dos parâmetros com os ganhos para o servo driver pressionado [===>>]. Aceite as janelas de confirmação.
7 – Após esse procedimento o Auto tuning estático estará completo. Desmarque a caixa [Enable Gain Control Panel] e termine de parametrizar o driver.