


Módulo Controlador do Robô
O Controlador do Robô Articulado Delta, conhecido como Série DCV, fornece eixos de extensão para controle de movimento através de servo-drives, módulos DI/O e conexão de dispositivos periféricos via DMCNET, rede de alta velocidade para comunicação em tempo real da Delta, para atender a todos os tipos de aplicações industriais. Além disso, o DCV também suporta a interface MODBUS/TCP para conectar dispositivos periféricos, incluindo sistemas de visão de máquina, sensores, controladores de host e computadores para um sistema de automação robótico completo.
Periféricos do Robô Articulado Delta
O módulo controlador do robô pode ser integrado com unidades de servo controle periféricos, com sistemas de visão, módulos de I/O remotos e interface de operação e programação “Teach Pendant”. A figura mostra um esquema da combinação dos periféricos da interface do controlador DCV.
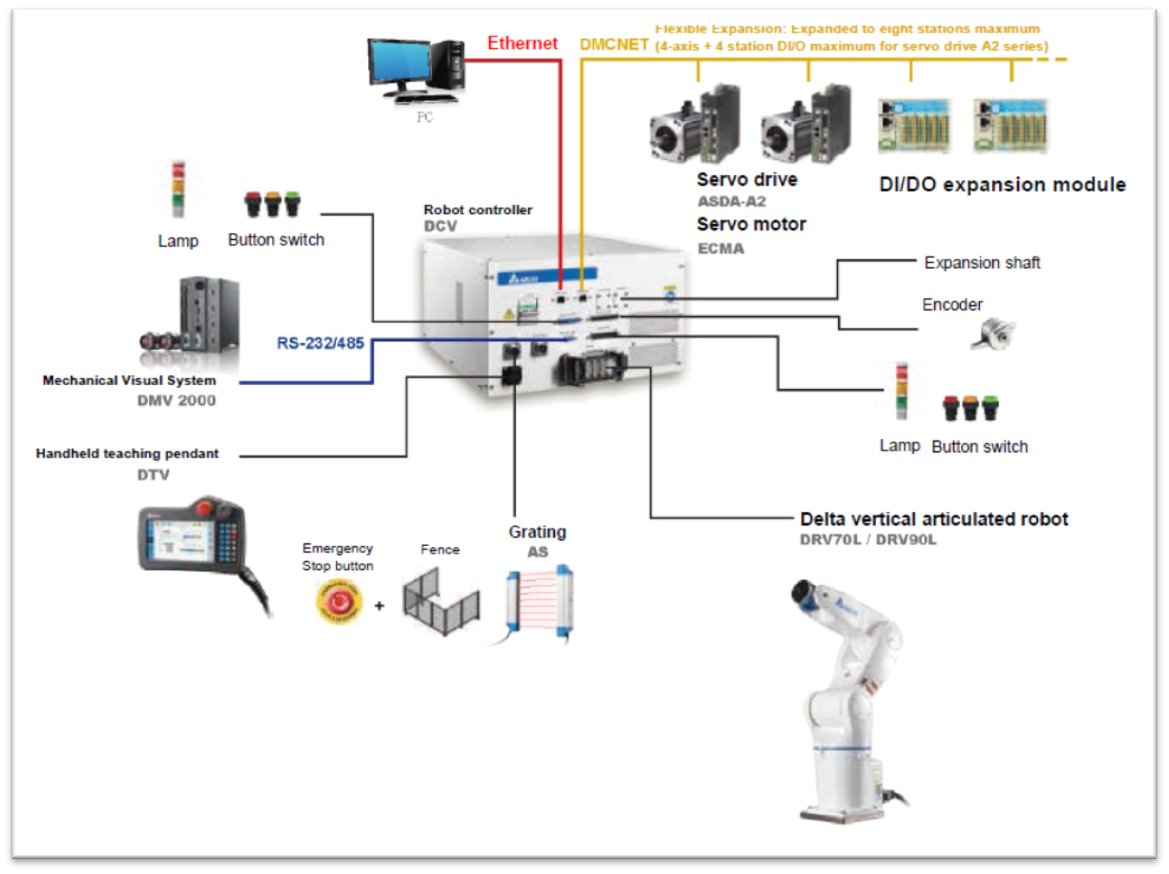
Arquitetura típica do Robô Articulado Delta com conexão do Controlador com dispositivos periféricos
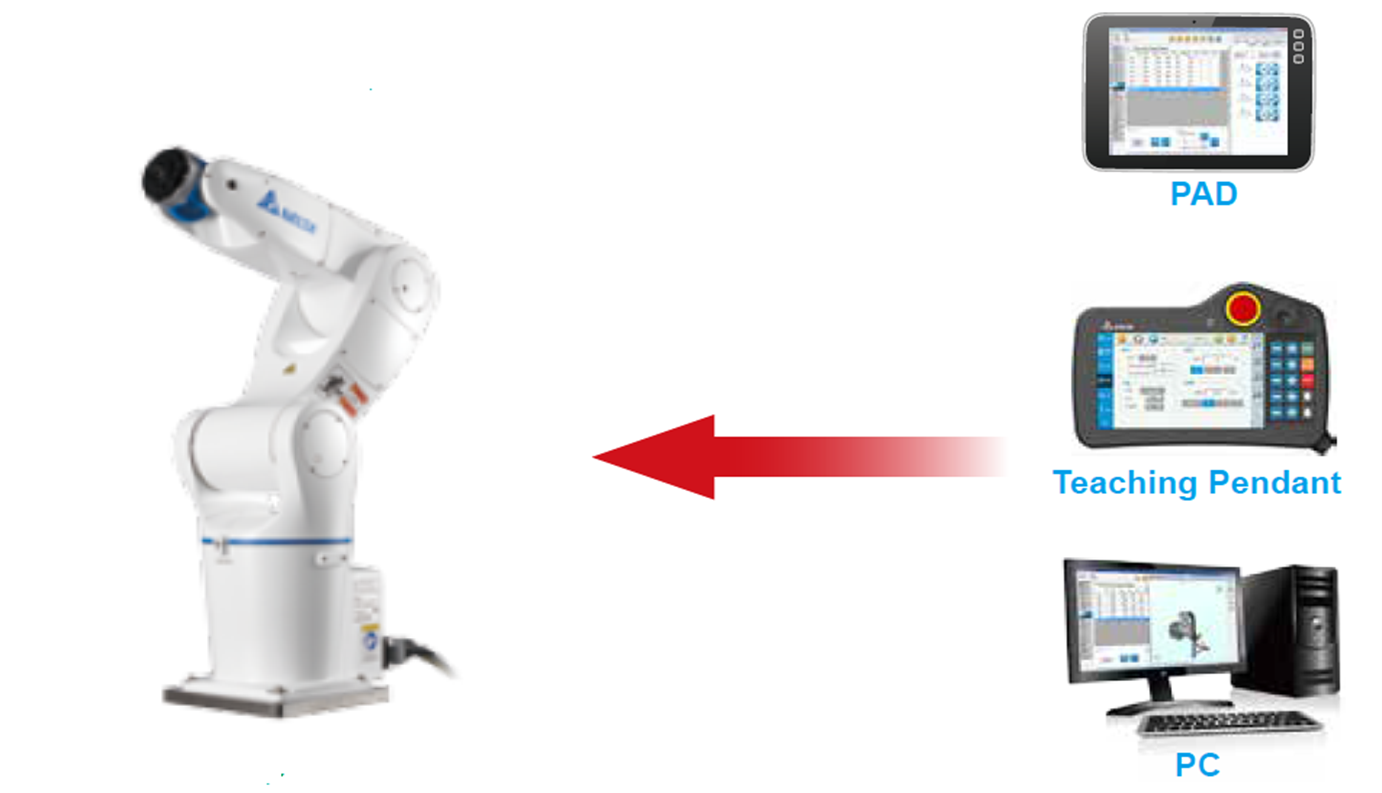
Programação do Robô SCARA: Múltiplos Métodos
A programação do Robô SCARA pode ser feita através de diferentes métodos: Notebook, “Teach Pendant” ou um PAD.
Software de Programação: DRAStudio
DRAStudio é um software para integração robótica, ou seja, possui várias funcionalidades para programação do robô, com linguagens de programação simples e intuitiva, Além disto, possibilita a manutenção do robô através da monitoração em tempo real das suas operações.
- Programação fácil para várias aplicações.
- Cria um ambiente de simulação off-line para robôs.
- Ambiente de programação amigável.
- Programação gráfica rápida e fácil.
- Linguagens de programação simplificadas e comandos simples que possibilitam um ambiente de desenvolvimento eficiente.
- Integra dados e sinais de dispositivos periféricos para configurar interface definida pelo usuário.
Handhel Teach Pendant
A programação de um robô com instruções manuais pode ser trabalhoso e requerer muito tempo para depurar o programa. Além disso, é difícil atingir 100 por cento precisão de movimento no espaço 3D. Um método de programação de Robôs é utilizar um dispositivo portátil chamado “Handheld Teach Pendant”, ou Interface Homem Máquina para Robô. O “Handheld Teach Pendant” permite ao operador mover o robô através de uma variedade de movimentos. Quando uma sequência foi totalmente especificada, o robô pode operar a programação a toda velocidade.

Handheld Teach Pendant
Módulo Controlador do Robô
O Controlador do Robô Articulado Delta, conhecido como Série DCV, fornece eixos de extensão para controle de movimento através de servo-drives, módulos DI/O e conexão de dispositivos periféricos via DMCNET, rede de alta velocidade para comunicação em tempo real da Delta, para atender a todos os tipos de aplicações industriais. Além disso, o DCV também suporta a interface MODBUS/TCP para conectar dispositivos periféricos, incluindo sistemas de visão de máquina, sensores, controladores de host e computadores para um sistema de automação robótico completo.
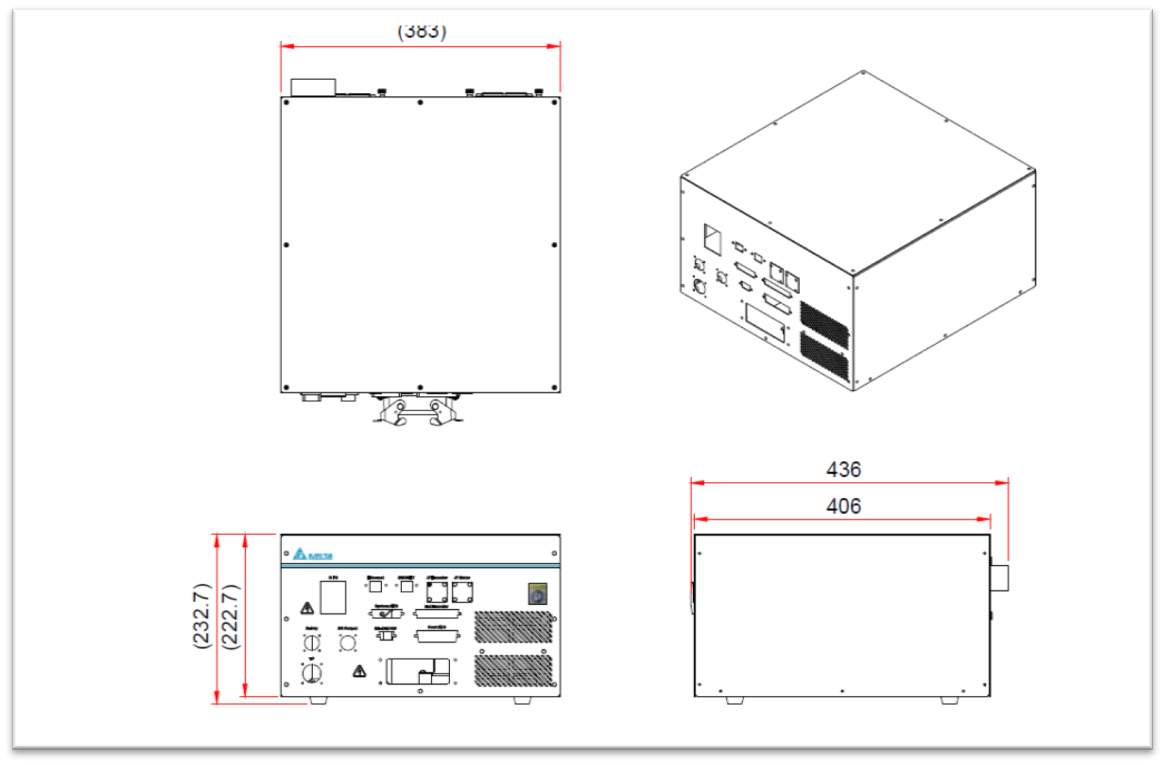
Série DCV – Controlador do Robô Articulado Delta
Periféricos do Robô Articulado Delta
O módulo controlador do robô pode ser integrado com unidades de servo controle periféricos, com sistemas de visão, módulos de I/O remotos e interface de operação e programação “Teach Pendant”. A figura mostra um esquema da combinação dos periféricos da interface do controlador DCV.
Arquitetura típica do Robô Articulado Delta com conexão do Controlador com dispositivos periféricos
Programação do Robô SCARA: Múltiplos Métodos
A programação do Robô SCARA pode ser feita através de diferentes métodos: Notebook, “Teach Pendant” ou um PAD.
Software de Programação: DRAStudio
DRAStudio é um software para integração robótica, ou seja, possui várias funcionalidades para programação do robô, com linguagens de programação simples e intuitiva, Além disto, possibilita a manutenção do robô através da monitoração em tempo real das suas operações.
- Programação fácil para várias aplicações.
- Cria um ambiente de simulação off-line para robôs.
- Ambiente de programação amigável.
- Programação gráfica rápida e fácil.
- Linguagens de programação simplificadas e comandos simples que possibilitam um ambiente de desenvolvimento eficiente.
- Integra dados e sinais de dispositivos periféricos para configurar interface definida pelo usuário.
Handhel Teach Pendant
A programação de um robô com instruções manuais pode ser trabalhoso e requerer muito tempo para depurar o programa. Além disso, é difícil atingir 100 por cento precisão de movimento no espaço 3D. Um método de programação de Robôs é utilizar um dispositivo portátil chamado “Handheld Teach Pendant”, ou Interface Homem Máquina para Robô. O “Handheld Teach Pendant” permite ao operador mover o robô através de uma variedade de movimentos. Quando uma sequência foi totalmente especificada, o robô pode operar a programação a toda velocidade.
Handheld Teach Pendant