


Módulo controlador de robot
El controlador de robot articulado Delta, conocido como la serie DCV, proporciona ejes de extensión para control de movimiento a través de servovariadores, módulos DI / O y conexión de dispositivos periféricos a través de DMCNET, la red de alta velocidad de Delta para comunicación en tiempo real, para satisfacer todo tipo de aplicaciones industriales. Además, el DCV también admite la interfaz MODBUS / TCP para conectar dispositivos periféricos, incluidos sistemas de visión artificial, sensores, controladores de host y computadoras para un sistema de automatización robótico completo.
Periféricos de robot articulado Delta
El módulo de controlador de robot se puede integrar con unidades de control de servo periféricas, con sistemas de visión, módulos de E / S remotas y la interfaz de operación y programación “Teach Pendant”. La figura muestra un esquema de la combinación de los periféricos de la interfaz del controlador DCV.
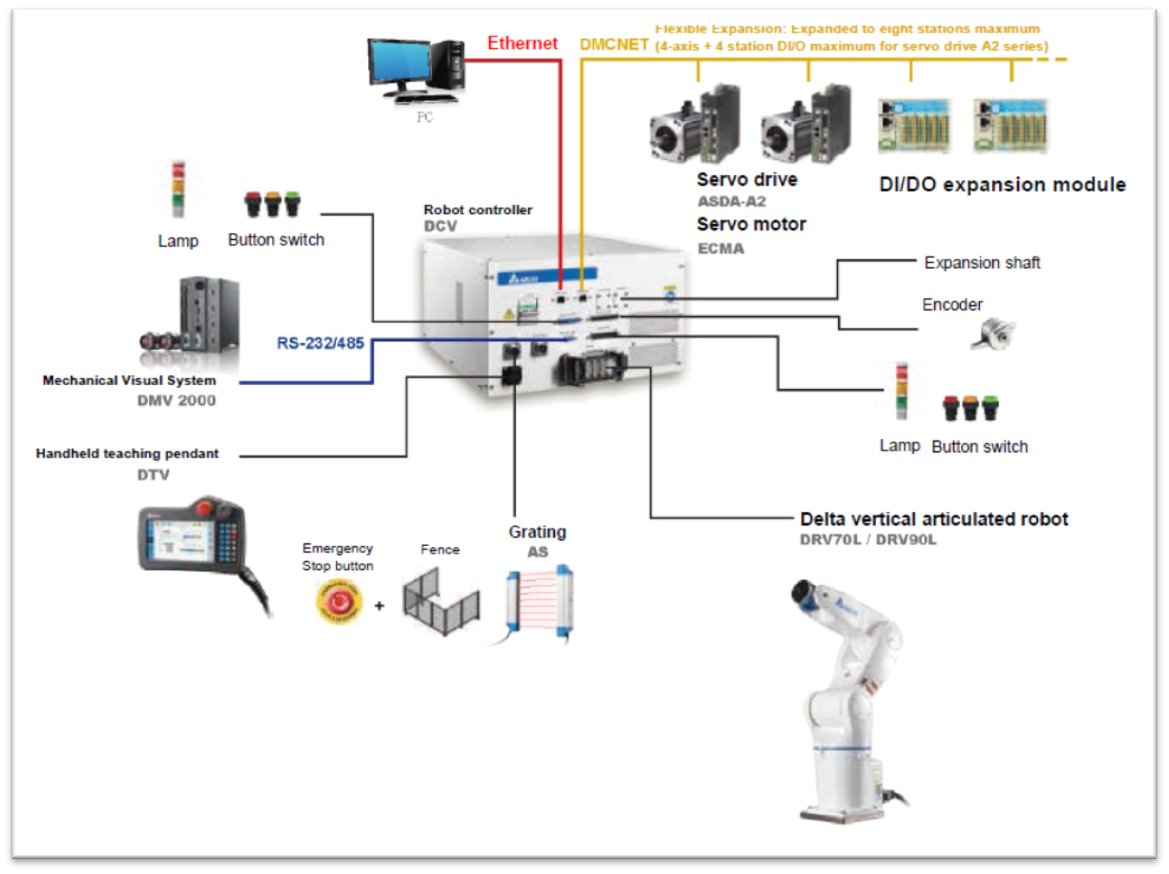
Arquitectura típica del robot articulado Delta con conexión del controlador con dispositivos periféricos
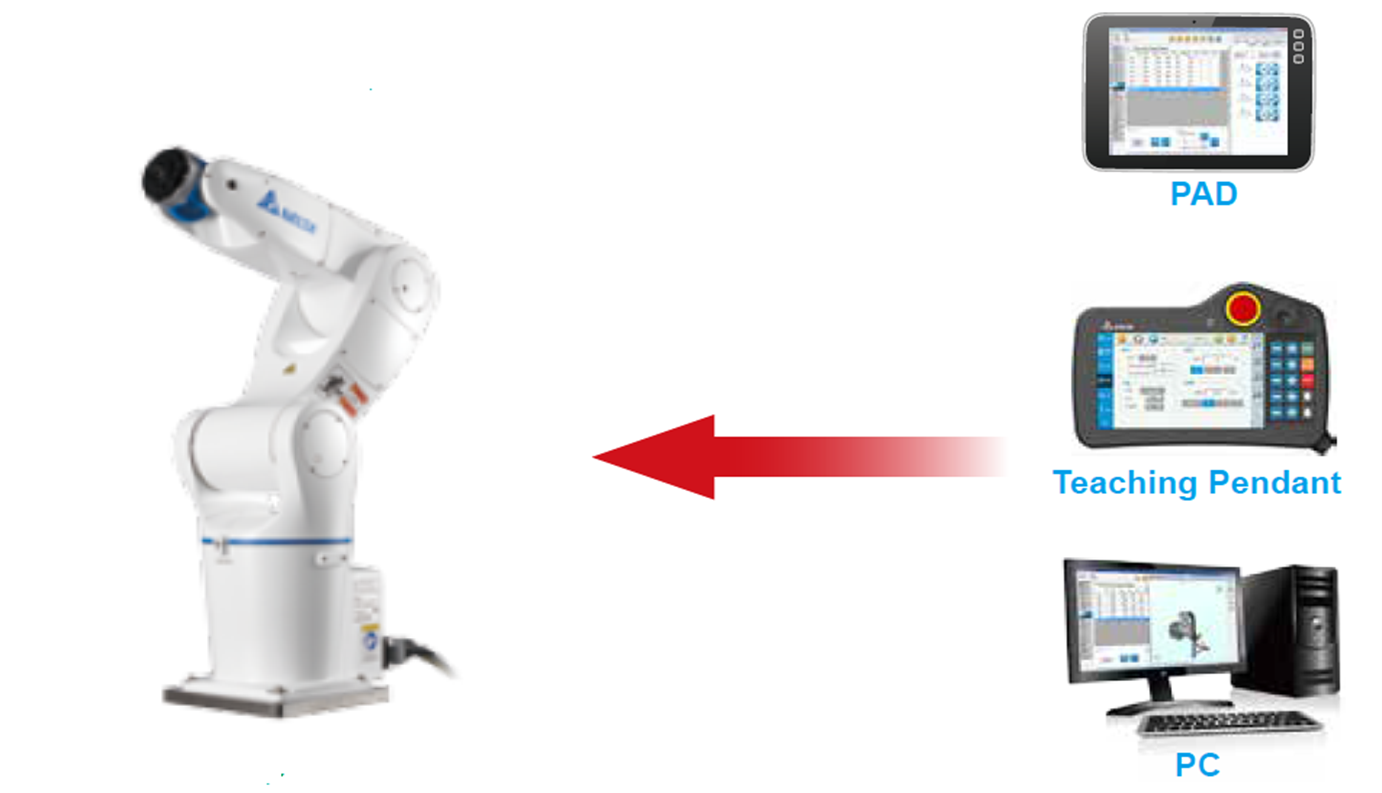
Programación de robots SCARA: múltiples métodos
La programación del Robot SCARA se puede realizar a través de diferentes métodos: Notebook, “Teach Pendant” o un PAD.
Software de programación: DRAStudio
DRAStudio es un software de integración robótica, es decir, cuenta con varias funcionalidades para la programación del robot, con lenguajes de programación sencillos e intuitivos, además, permite el mantenimiento del robot a través del monitoreo en tiempo real de sus operaciones.
- Fácil programación para diversas aplicaciones.
- Crea un entorno de simulación fuera de línea para robots.
- Entorno de programación amigable.
- Programación gráfica rápida y sencilla.
- Lenguajes de programación simplificados y comandos simples que permiten un entorno de desarrollo eficiente.
- Integra datos y señales de dispositivos periféricos para configurar la interfaz definida por el usuario.
Colgante Handhel Teach
Programar un robot con instrucciones manuales puede resultar laborioso y llevar mucho tiempo depurar el programa. Además, es difícil lograr una precisión de movimiento del 100 por ciento en el espacio 3D. Un método de programación de Robots es utilizar un dispositivo portátil llamado "Colgante de enseñanza portátil", o Interfaz hombre-máquina para robot. El “Teach Colgante portátil” permite al operador mover el robot a través de una variedad de movimientos. Cuando se ha especificado completamente una secuencia, el robot puede operar la programación a toda velocidad.

Colgante de enseñanza de mano
Módulo controlador de robot
El controlador de robot articulado Delta, conocido como la serie DCV, proporciona ejes de extensión para control de movimiento a través de servovariadores, módulos DI / O y conexión de dispositivos periféricos a través de DMCNET, la red de alta velocidad de Delta para comunicación en tiempo real, para satisfacer todo tipo de aplicaciones industriales. Además, el DCV también admite la interfaz MODBUS / TCP para conectar dispositivos periféricos, incluidos sistemas de visión artificial, sensores, controladores de host y computadoras para un sistema de automatización robótico completo.
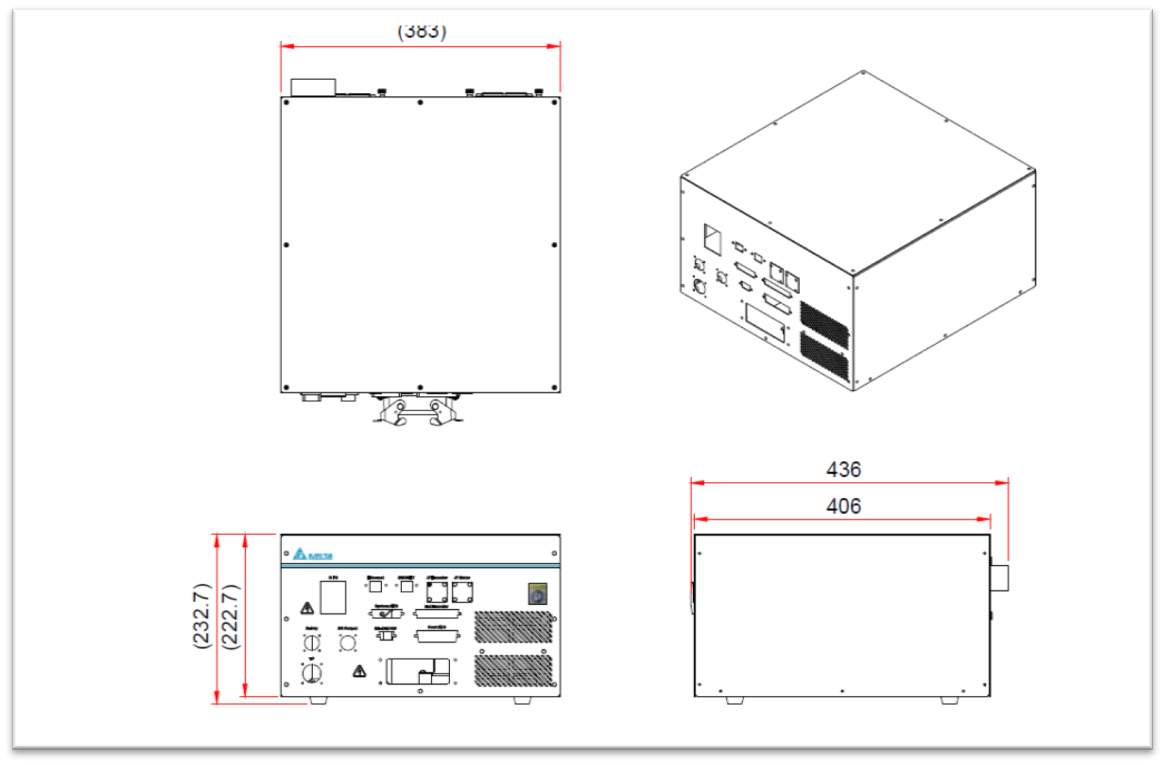
Serie DCV - Controlador de robot articulado Delta
Periféricos de robot articulado Delta
El módulo de controlador de robot se puede integrar con unidades de control de servo periféricas, con sistemas de visión, módulos de E / S remotas y la interfaz de operación y programación “Teach Pendant”. La figura muestra un esquema de la combinación de los periféricos de la interfaz del controlador DCV.
Arquitectura típica del robot articulado Delta con conexión del controlador con dispositivos periféricos
Programación de robots SCARA: múltiples métodos
La programación del Robot SCARA se puede realizar a través de diferentes métodos: Notebook, “Teach Pendant” o un PAD.
Software de programación: DRAStudio
DRAStudio es un software de integración robótica, es decir, cuenta con varias funcionalidades para la programación del robot, con lenguajes de programación sencillos e intuitivos, además, permite el mantenimiento del robot a través del monitoreo en tiempo real de sus operaciones.
- Fácil programación para diversas aplicaciones.
- Crea un entorno de simulación fuera de línea para robots.
- Entorno de programación amigable.
- Programación gráfica rápida y sencilla.
- Lenguajes de programación simplificados y comandos simples que permiten un entorno de desarrollo eficiente.
- Integra datos y señales de dispositivos periféricos para configurar la interfaz definida por el usuario.
Colgante Handhel Teach
Programar un robot con instrucciones manuales puede resultar laborioso y llevar mucho tiempo depurar el programa. Además, es difícil lograr una precisión de movimiento del 100 por ciento en el espacio 3D. Un método de programación de Robots es utilizar un dispositivo portátil llamado "Colgante de enseñanza portátil", o Interfaz hombre-máquina para robot. El “Teach Colgante portátil” permite al operador mover el robot a través de una variedad de movimientos. Cuando se ha especificado completamente una secuencia, el robot puede operar la programación a toda velocidad.
Colgante de enseñanza de mano