
#07 – Controlador PID Copy
O Controlador PID é um algoritmo de controle amplamente utilizado em sistemas de automação industrial, controle de processos e outras aplicações em que é necessário controlar uma variável em relação a um valor desejado. PID significa Proporcional, Integral e Derivativo, que são os três termos que compõem o algoritmo.
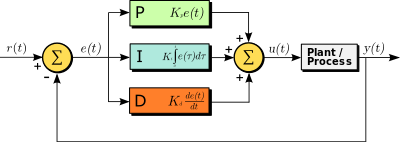
O termo Proporcional é responsável por controlar a variável em relação à diferença entre o valor desejado e o valor atual. O termo Integral é responsável por acumular as diferenças ao longo do tempo, a fim de corrigir desvios persistentes. O termo Derivativo é responsável por prever o comportamento futuro da variável, com base em sua taxa de variação atual.
O objetivo do controlador PID é manter a variável controlada o mais próximo possível do valor desejado, com um mínimo de oscilação ou overshoot. Isso é alcançado ajustando os parâmetros do controlador, como as constantes de ganho para cada um dos termos.
O controlador PID é amplamente utilizado em sistemas de controle de temperatura, pressão, nível, velocidade, entre outros, em diversos setores industriais, como alimentos e bebidas, petroquímico, farmacêutico, automotivo, entre outros. Além disso, o controlador PID também é usado em sistemas de controle de voo, robótica e outras aplicações em que é necessário controlar uma variável em relação a um valor desejado.
Entre as vantagens do controlador PID estão a sua simplicidade, flexibilidade e baixo custo, em comparação com outras técnicas de controle. Além disso, o controlador PID pode ser facilmente adaptado a diferentes tipos de processos e pode ser ajustado para atender às necessidades específicas de cada aplicação.
No entanto, o controlador PID pode apresentar desafios na sua sintonia e ajuste, especialmente em processos com comportamento não-linear ou altamente variáveis. Além disso, é necessário levar em conta a dinâmica do processo controlado, a fim de evitar instabilidades ou respostas indesejadas.